 夜雨聆风
夜雨聆风





工业机械手系统组成,文末附3D模型下载链接!

您看此文已用
 ·
·
 秒,转发只需1秒呦~
秒,转发只需1秒呦~
机械工程文萃-2-2026年06月23日星期二
–正文—
机械手(Manipulator/Robot Arm)作为自动化装备的核心执行机构,其机械设计是一个高度集成的系统工程,涉及运动学、动力学、材料学及精密传动等多个领域。
1. 自由度与构型设计
机械手的构型决定了其工作空间、运动灵活性及适用场景。在设计初期,需要根据任务需求确定机械手的自由度(DOF):
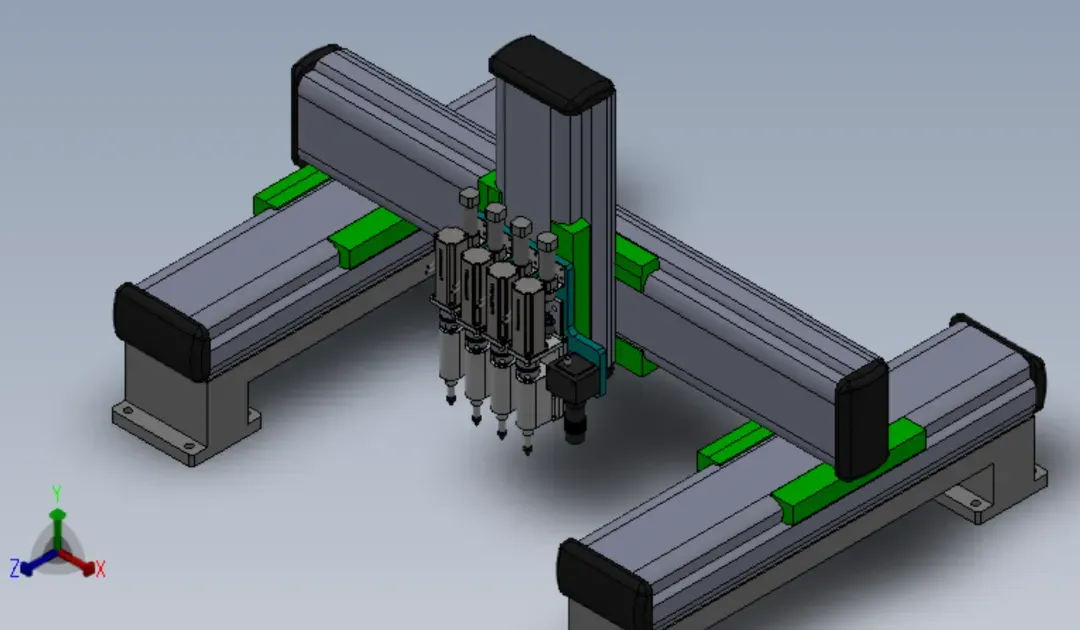
- 直角坐标型:各关节沿直线运动,结构简单、定位精度高,适用于大行程、高负载的搬运或OLED喷墨打印中的直线运动平台。
- 圆柱/球坐标型:通过旋转与直线运动的组合,适合特定的空间作业。
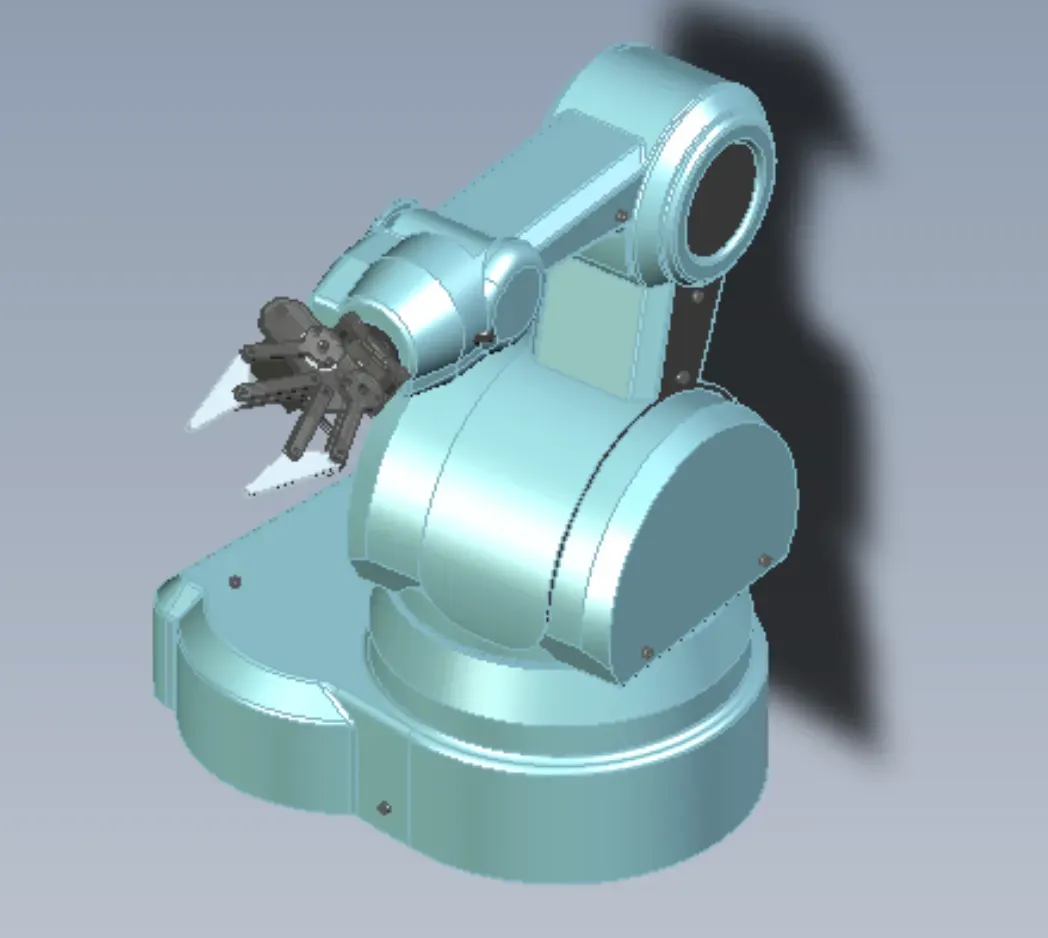
- 多关节型(如六轴机械手):具有极高的运动灵活性,能够避开障碍物到达复杂姿态,广泛应用于焊接、装配及柔性制造。
- SCARA型:在水平面内具有极高的运动速度和刚性,常用于平面装配、点胶及高速分拣。
2. 精密传动与驱动系统
机械手关节的运动精度与响应速度直接取决于传动机构的设计。
为了消除间隙并提高刚度,高端机械手通常采用以下设计:
- 谐波减速器:具有传动比大、体积小、零背隙的特点,是中小型多关节机械手(特别是协作机器人)关节的首选。
- RV减速器:具有极高的刚性和抗冲击能力,通常应用于机械手的基座、大臂等重载关节部位。
- 伺服电机与编码器:作为动力源,配合高分辨率的绝对值编码器,实现闭环的精准位置、速度和力矩控制。
3. 末端执行器(EOAT)设计
末端执行器是机械手与工件直接接触的“手”,其设计需根据抓取对象的物理特性量身定制:
- 夹爪式:通过气动或电动驱动,实现平行开合或角度开合,适用于规则形状工件的抓取。
- 吸盘式:利用真空负压吸附,适用于表面平整的板材(如OLED玻璃基板、PCB板)或易损件。
- 柔性仿生手:采用软体材料或特殊机械结构,用于抓取形状不规则或易碎物品。
4. 轻量化与结构刚度优化
在高速运动中,机械手自身的重量会产生巨大的惯性力,因此结构设计需要在“轻量化”与“高刚度”之间寻找平衡:
- 材料选择:大量采用铝合金、碳纤维复合材料或钛合金,以降低运动惯量,提升动态响应。
- 拓扑优化:利用有限元分析(FEA)对机械臂连杆进行内部镂空或加强筋设计,在保证结构强度的前提下最大限度减轻自重。
5. 柔顺控制与力觉反馈
现代机械手的设计不再局限于纯粹的位置控制,而是向力位混合控制发展:
- 力矩传感器:在关节或腕部集成六维力传感器,使机械手能够感知外部接触力。
- 阻抗/导纳控制:通过算法与机械结构的配合,使机械手在接触工件时表现出特定的“柔性”,从而安全地与人协作,或完成精密的插拔、打磨等需要力控的作业。
机械手的机械设计不仅仅是零部件的堆砌,而是从任务需求出发,对构型、传动、末端执行及控制策略进行全局统筹,以实现高精度、高动态响应和高可靠性的自动化作业。
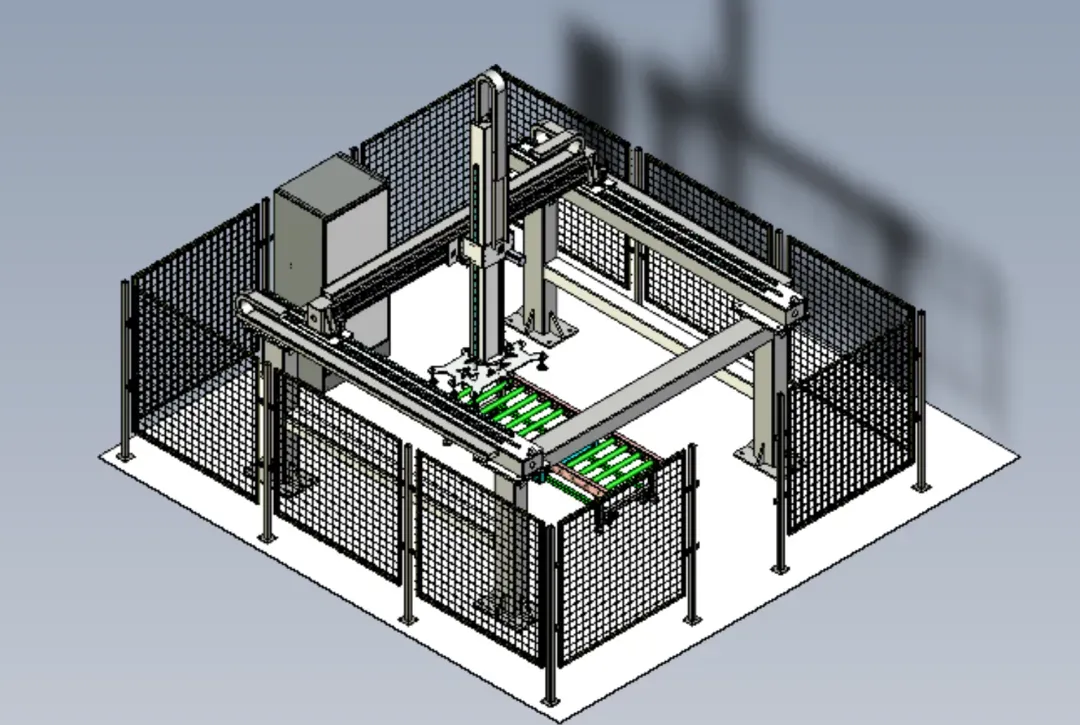
高速移栽机械手
链接: https://pan.baidu.com/s/1w4m6KAVztmBCvZklJnWUHg 提取码: rz8d
(3D模型与前文并无关联,同类型设备供参考!)


推荐视频

END
声明:部分内容来源于网络,仅供学习、交流。版权归原作者所有。如有不妥,请联系删除。


觉得文章不错,就点个在看吧