文档内容
第二部分 通用技术(共 50 分)
一、选择题(本大题共12小题,每小题2分,共24分。每小题列出的四个备选项中只有一个是
符合题目要求的,不选、多选、错选均不得分)
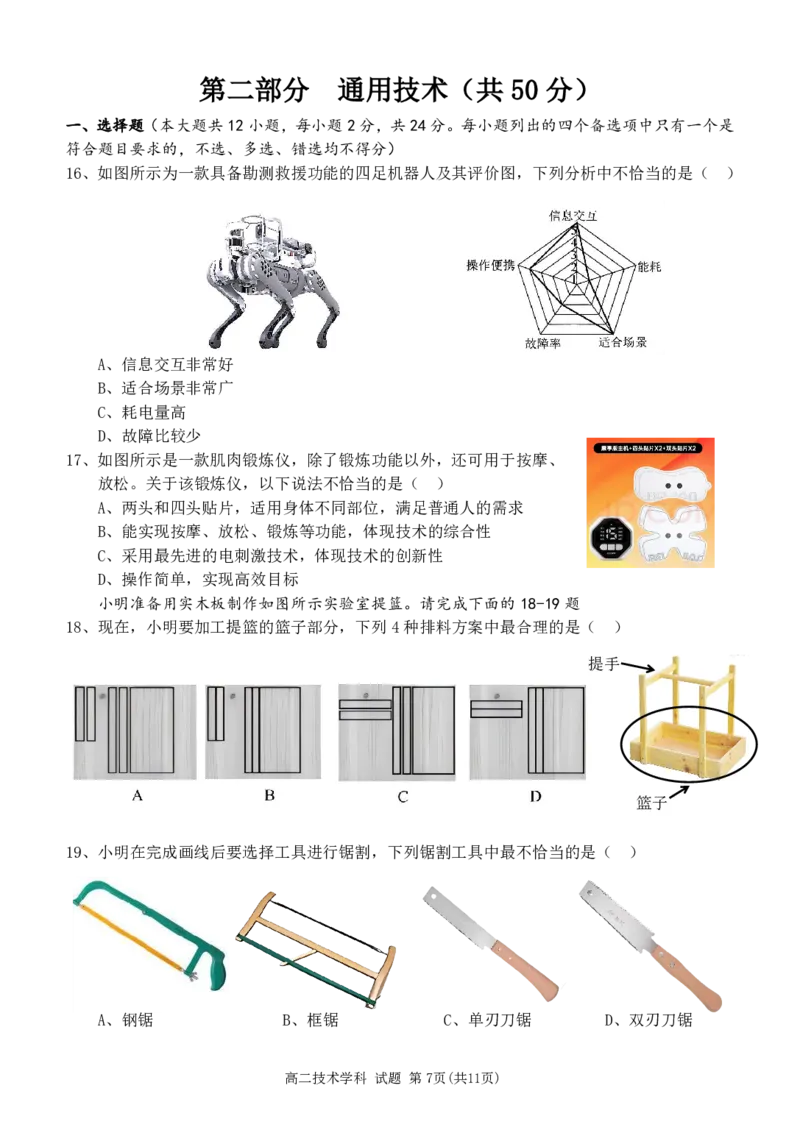
16、如图所示为一款具备勘测救援功能的四足机器人及其评价图,下列分析中不恰当的是( )
A、信息交互非常好
B、适合场景非常广
C、耗电量高
D、故障比较少
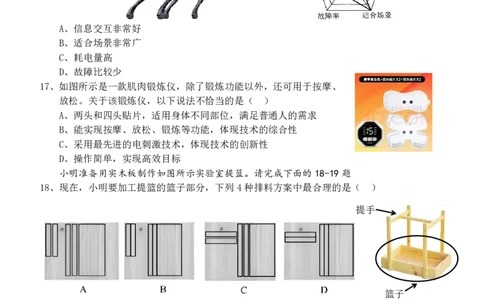
17、如图所示是一款肌肉锻炼仪,除了锻炼功能以外,还可用于按摩、
放松。关于该锻炼仪,以下说法不恰当的是( )
A、两头和四头贴片,适用身体不同部位,满足普通人的需求
B、能实现按摩、放松、锻炼等功能,体现技术的综合性
C、采用最先进的电刺激技术,体现技术的创新性
D、操作简单,实现高效目标
小明准备用实木板制作如图所示实验室提篮。请完成下面的18-19题
18、现在,小明要加工提篮的篮子部分,下列4种排料方案中最合理的是( )
提手
篮子
19、小明在完成画线后要选择工具进行锯割,下列锯割工具中最不恰当的是( )
A、钢锯 B、框锯 C、单刃刀锯 D、双刃刀锯
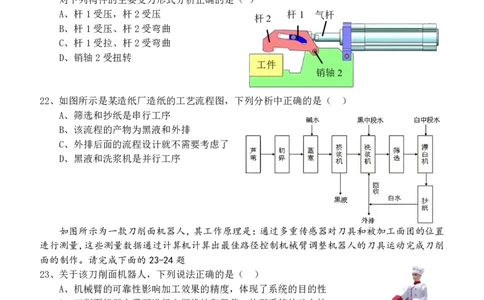
高二技术学科 试题 第7页(共11页)20、如图所示是某形体的主视图和俯视图,相对应的左视图是( )
21、如图所示是一种压紧机构。压紧工件时,气杆伸长,通过杆1推动杆2将工件压紧。压紧后,
对下列构件的主要受力形式分析正确的是( )
A、杆1受压,杆2受压
杆2
杆1 气杆
B、杆1受压、杆2受弯曲
C、杆1受拉、杆2受弯曲
D、销轴2受扭转
工件
销轴2
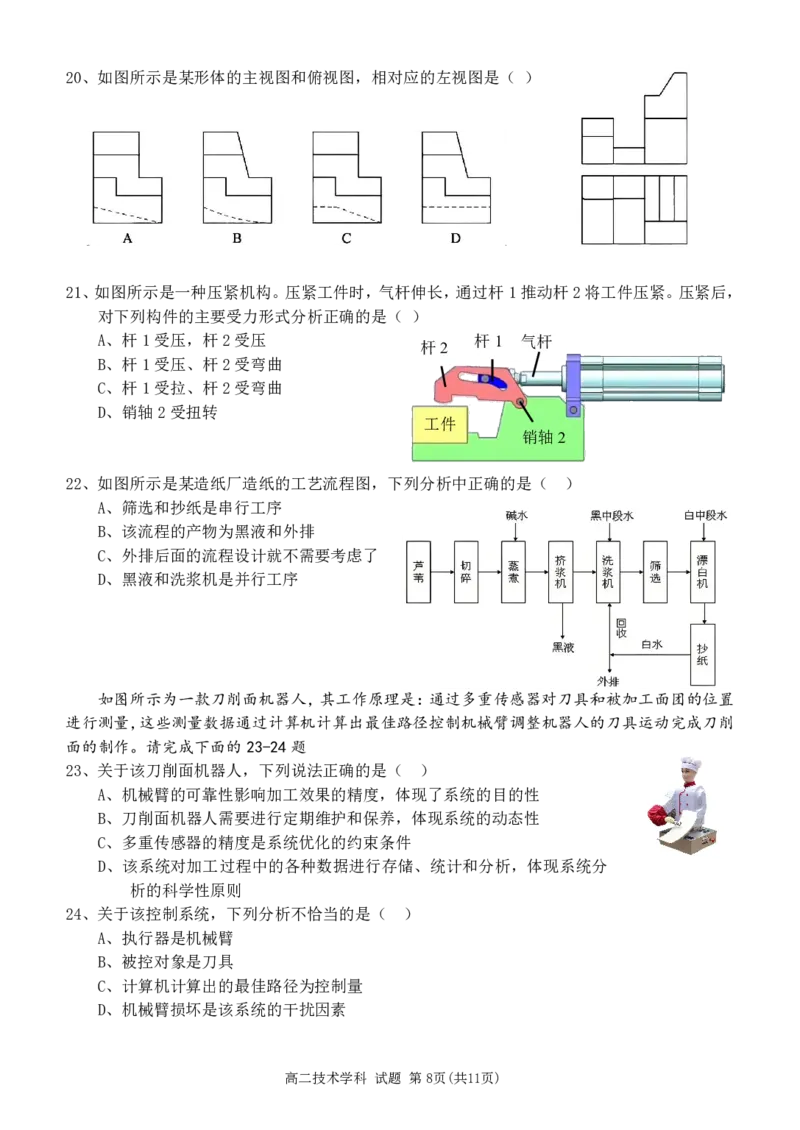
22、如图所示是某造纸厂造纸的工艺流程图,下列分析中正确的是( )
A、筛选和抄纸是串行工序
B、该流程的产物为黑液和外排
C、外排后面的流程设计就不需要考虑了
D、黑液和洗浆机是并行工序
如图所示为一款刀削面机器人,其工作原理是:通过多重传感器对刀具和被加工面团的位置
进行测量,这些测量数据通过计算机计算出最佳路径控制机械臂调整机器人的刀具运动完成刀削
面的制作。请完成下面的23-24题
23、关于该刀削面机器人,下列说法正确的是( )
A、机械臂的可靠性影响加工效果的精度,体现了系统的目的性
B、刀削面机器人需要进行定期维护和保养,体现系统的动态性
C、多重传感器的精度是系统优化的约束条件
D、该系统对加工过程中的各种数据进行存储、统计和分析,体现系统分
析的科学性原则
24、关于该控制系统,下列分析不恰当的是( )
A、执行器是机械臂
B、被控对象是刀具
C、计算机计算出的最佳路径为控制量
D、机械臂损坏是该系统的干扰因素
高二技术学科 试题 第8页(共11页)25、在通用技术实践课中,小明在面包板上插装了多个元器件,如图所
示(导线未连)。其中插装错误的是( )
A、发光二极管
B、干簧管
C、运算放大器
D、电位器
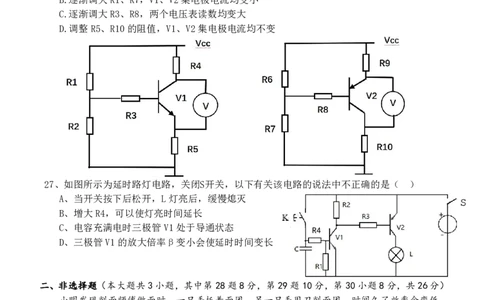
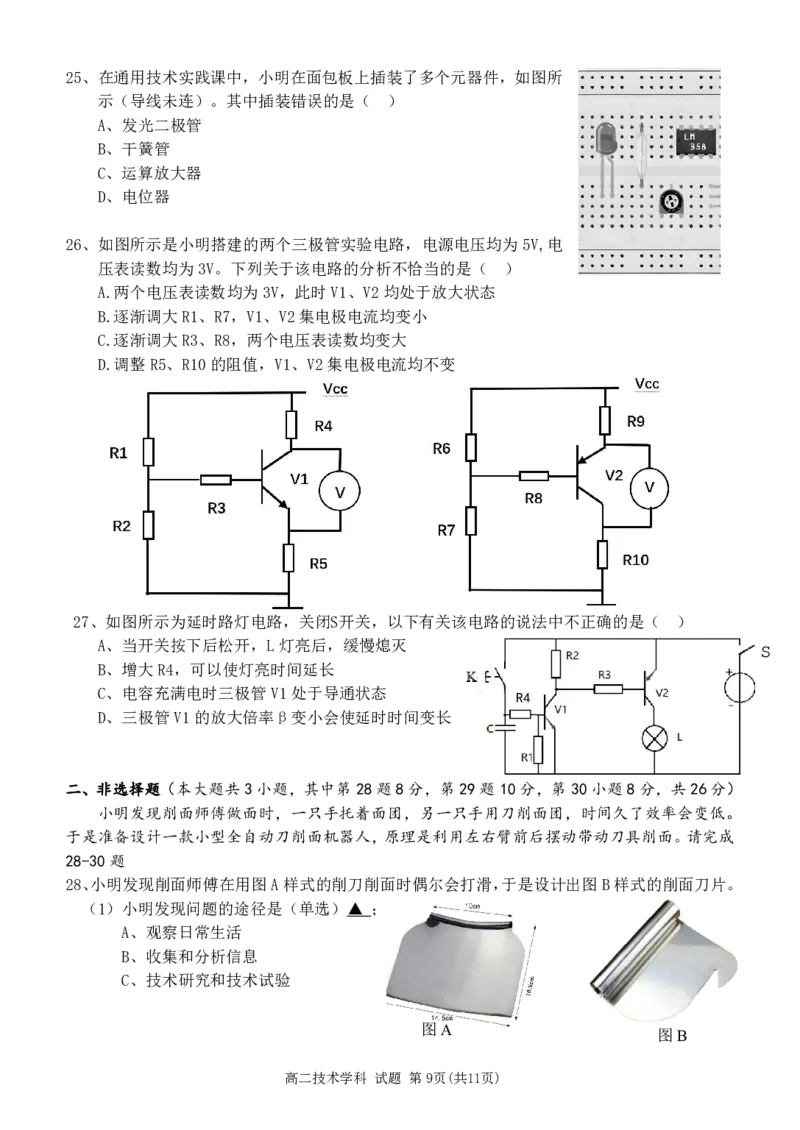
26、如图所示是小明搭建的两个三极管实验电路,电源电压均为5V,电
压表读数均为3V。下列关于该电路的分析不恰当的是( )
A.两个电压表读数均为3V,此时V1、V2均处于放大状态
B.逐渐调大R1、R7,V1、V2集电极电流均变小
C.逐渐调大R3、R8,两个电压表读数均变大
D.调整R5、R10的阻值,V1、V2集电极电流均不变
27、如图所示为延时路灯电路,关闭S开关,以下有关该电路的说法中不正确的是( )
A、当开关按下后松开,L灯亮后,缓慢熄灭 S
B、增大R4,可以使灯亮时间延长
C、电容充满电时三极管V1处于导通状态
R4
D、三极管V1的放大倍率β变小会使延时时间变长
二、非选择题(本大题共3小题,其中第28题8分,第29题10分,第30小题8分,共26分)
小明发现削面师傅做面时,一只手托着面团,另一只手用刀削面团,时间久了效率会变低。
于是准备设计一款小型全自动刀削面机器人,原理是利用左右臂前后摆动带动刀具削面。请完成
28-30题
28、小明发现削面师傅在用图A样式的削刀削面时偶尔会打滑,于是设计出图B样式的削面刀片。
(1)小明发现问题的途径是(单选)▲ ;
A、观察日常生活
B、收集和分析信息
C、技术研究和技术试验
图A
图B
高二技术学科 试题 第9页(共11页)(2)加工如图B样式的削面刀片时,合理的加工流程为: A → → → C →
E (填写选项)
A、划线 B、锯割 C、锉削 D、钻孔 E、弯折
(3)用薄钢板加工图B样式削面刀片时,没有用到的工具是( )(单选)
A、样冲 B、丝锥 C、锉刀 D、台钻
(4)小明在确定了削面刀片方案后,下列步骤中首先要做的是( )(单选)
A、绘制机械加工图 B、制作模型 C、测试评估及优化
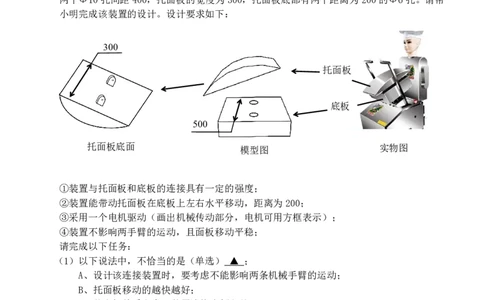
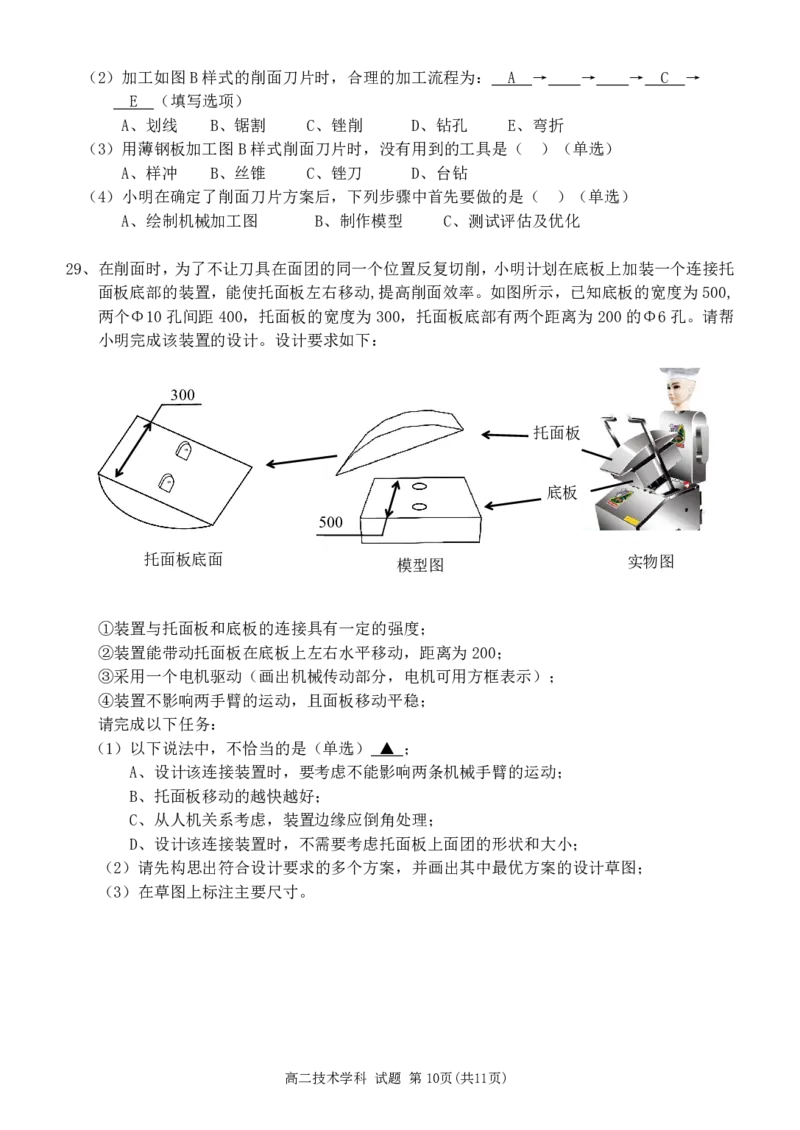
29、在削面时,为了不让刀具在面团的同一个位置反复切削,小明计划在底板上加装一个连接托
面板底部的装置,能使托面板左右移动,提高削面效率。如图所示,已知底板的宽度为500,
两个Φ10孔间距400,托面板的宽度为300,托面板底部有两个距离为200的Φ6孔。请帮
小明完成该装置的设计。设计要求如下:
300
托面板
底板
500
托面板底面 模型图 实物图
①装置与托面板和底板的连接具有一定的强度;
②装置能带动托面板在底板上左右水平移动,距离为200;
③采用一个电机驱动(画出机械传动部分,电机可用方框表示);
④装置不影响两手臂的运动,且面板移动平稳;
请完成以下任务:
(1)以下说法中,不恰当的是(单选) ▲ ;
A、设计该连接装置时,要考虑不能影响两条机械手臂的运动;
B、托面板移动的越快越好;
C、从人机关系考虑,装置边缘应倒角处理;
D、设计该连接装置时,不需要考虑托面板上面团的形状和大小;
(2)请先构思出符合设计要求的多个方案,并画出其中最优方案的设计草图;
(3)在草图上标注主要尺寸。
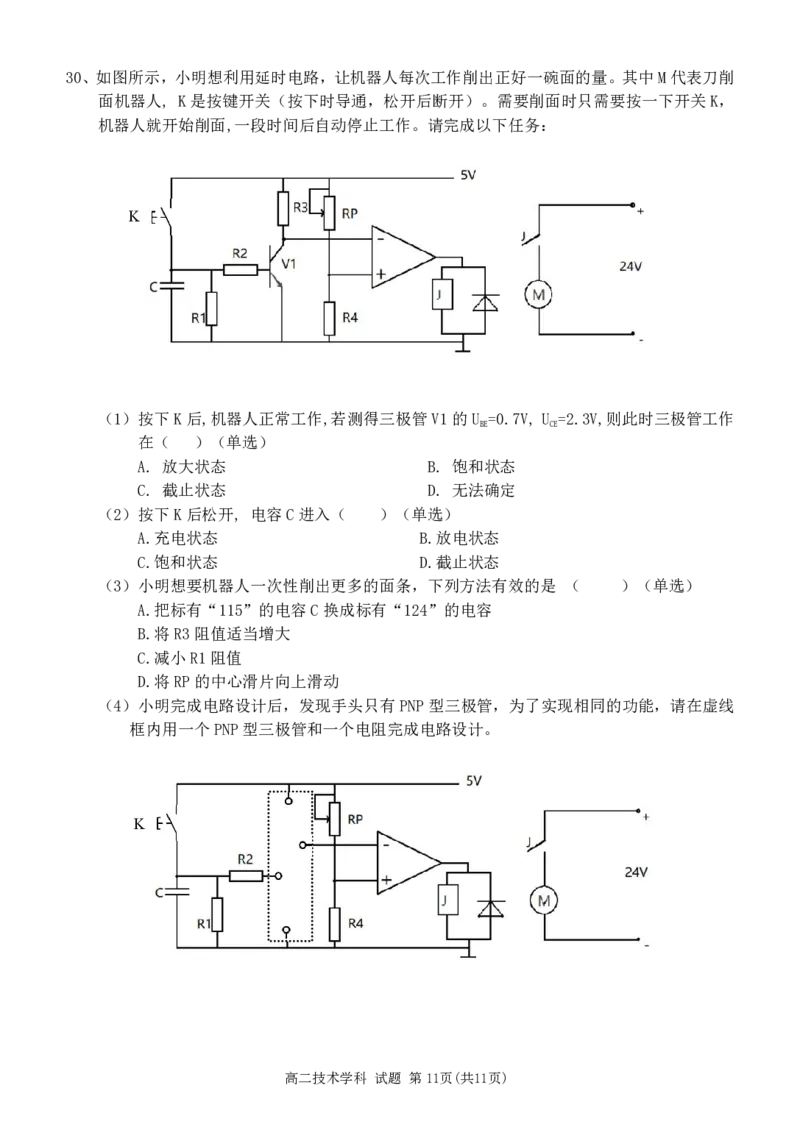
高二技术学科 试题 第10页(共11页)30、如图所示,小明想利用延时电路,让机器人每次工作削出正好一碗面的量。其中M代表刀削
面机器人, K是按键开关(按下时导通,松开后断开)。需要削面时只需要按一下开关K,
机器人就开始削面,一段时间后自动停止工作。请完成以下任务:
K
(1)按下K后,机器人正常工作,若测得三极管V1的U =0.7V, U =2.3V,则此时三极管工作
BE CE
在( )(单选)
A. 放大状态 B. 饱和状态
C. 截止状态 D. 无法确定
(2)按下K后松开, 电容C进入( )(单选)
A.充电状态 B.放电状态
C.饱和状态 D.截止状态
(3)小明想要机器人一次性削出更多的面条,下列方法有效的是 ( )(单选)
A.把标有“115”的电容C换成标有“124”的电容
B.将R3阻值适当增大
C.减小R1阻值
D.将RP的中心滑片向上滑动
(4)小明完成电路设计后,发现手头只有PNP型三极管,为了实现相同的功能,请在虚线
框内用一个PNP型三极管和一个电阻完成电路设计。
K
高二技术学科 试题 第11页(共11页)
