 夜雨聆风
夜雨聆风





Omnicore无碰撞选项关闭碰撞检测插件
更多内容请点击上方 ABB机器人实战技巧 关注
也可点击公众号下方 往期经典 浏览更多内容
转载请先后台留言,大家一起支持原创,推动机器人使用和发展
本公众号对各类ABB机器人应用,仿真,毕业设计提供技术支持,详细后台留言
本公众号诚挚希望与各机器人培训机构,机器人使用单元合作,提供技术支持,详细后台留言
Omnicore与Robotware6 若干功能差异提示 一文介绍了,在Omnicore系统中,如果没有3107-1选项,无法在示教器强制临时关闭碰撞检测。
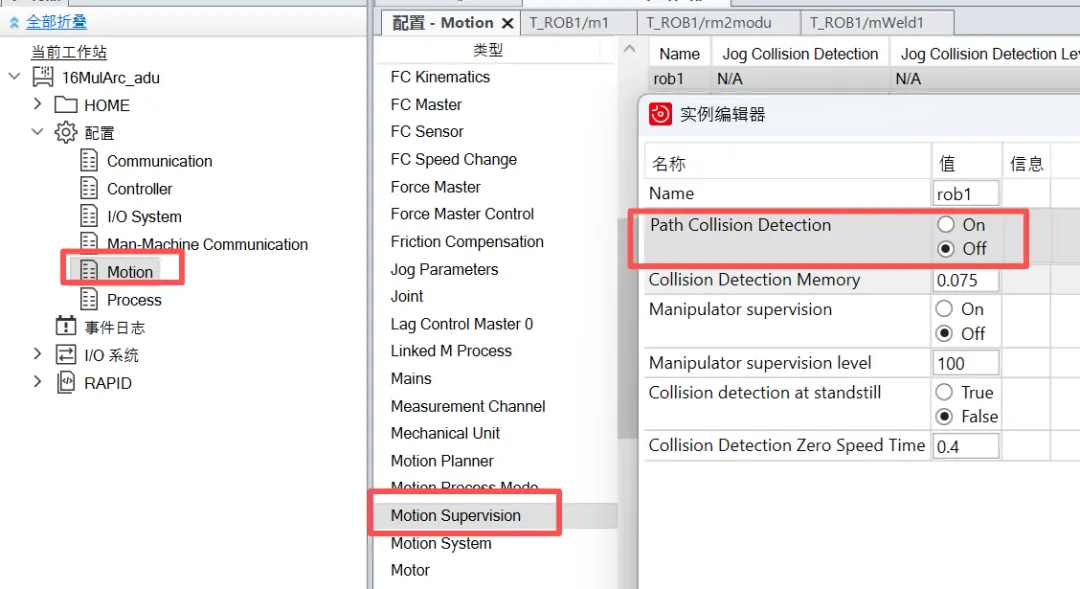
实际上,如果没有3107-1选项,用户仍可以通过RobotStudio,在配置-motion-motion supervision 对path collision detection关闭。jog collision detection以及灵敏度调节需要3107-1选项。
现场如果不方便使用RobotStudio,则可以使用AppStudio制作相关插件,让用户通过示教器界面修改该参数。
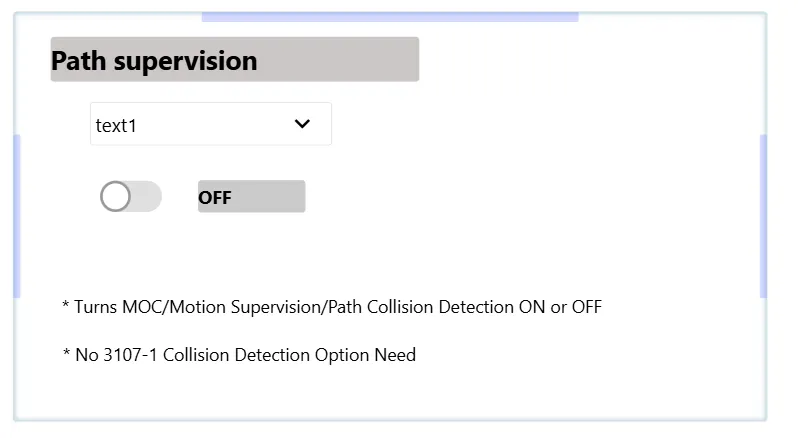
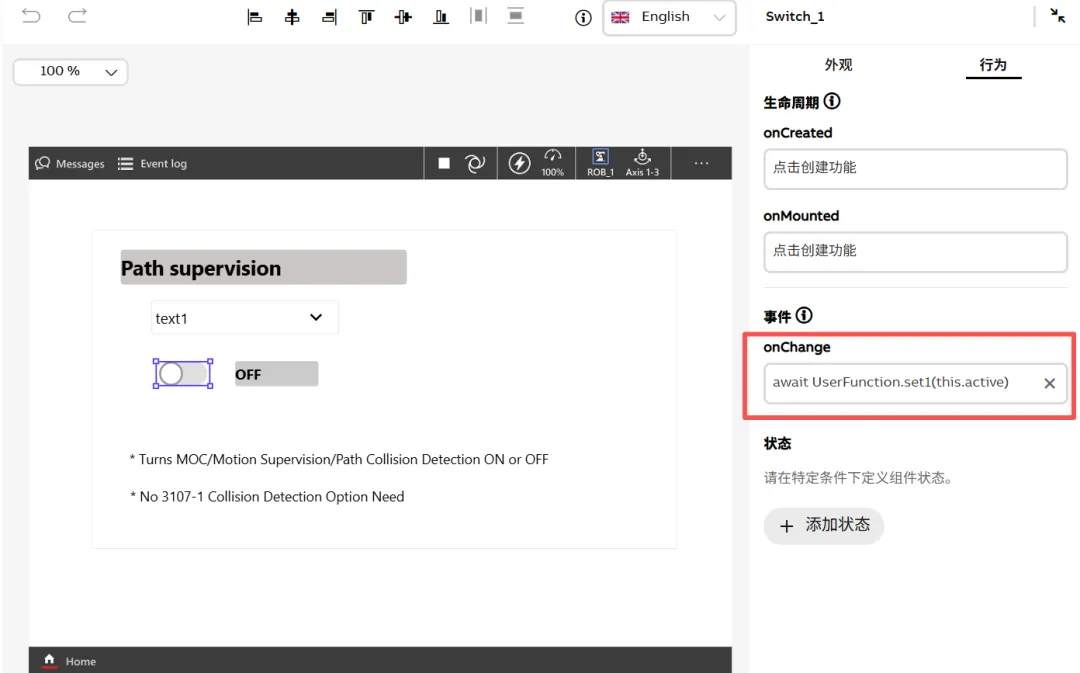
1. 在AppStudio创建如下界面(下拉框用于显示有几个机器人),Swtich和text用于调整和显示路径碰撞开关状态
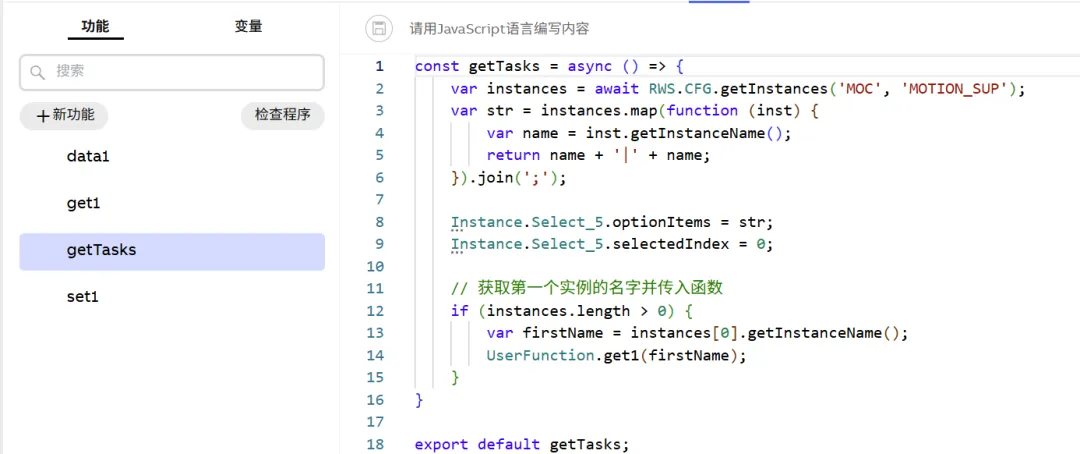
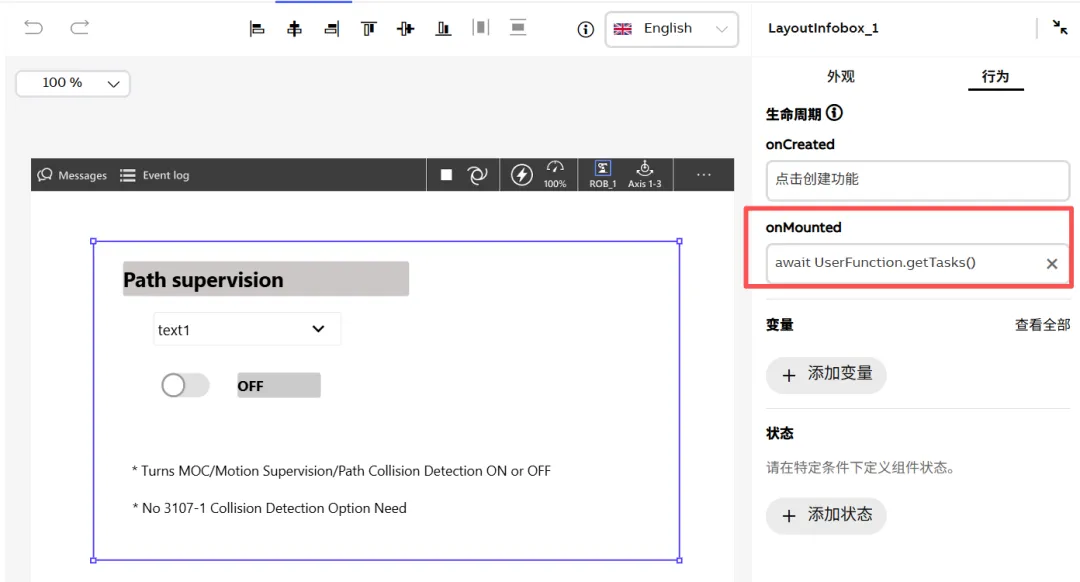
2. 创建getTasks函数,并关联到LayutInfobox_1的onMounted事件中。
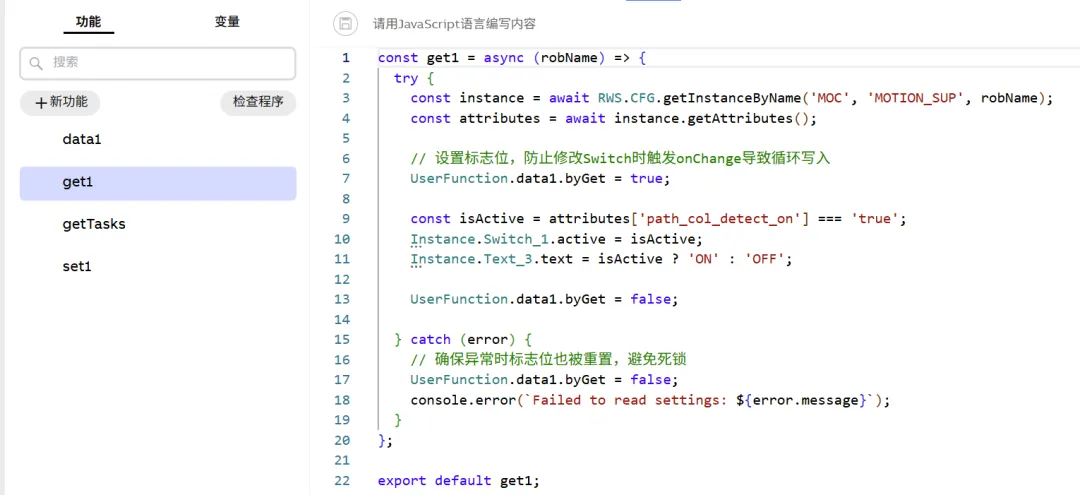
3. 创建get1函数,用于获取MOC/MOTION_SUP下的对应机器人的path_col_detect_on 的值。
4. 创建set1函数,用于写入修改值,并关联到Swtich的onChange事件
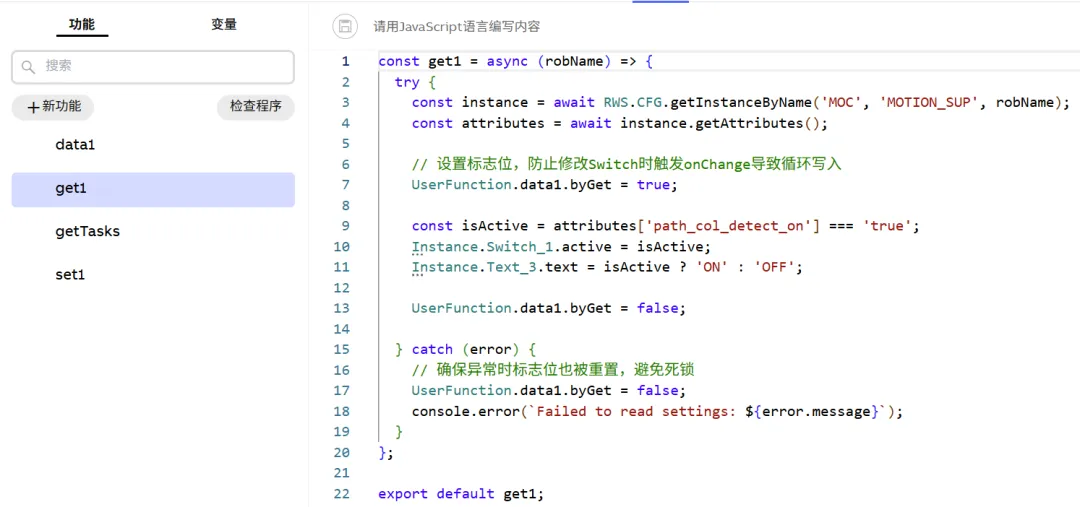
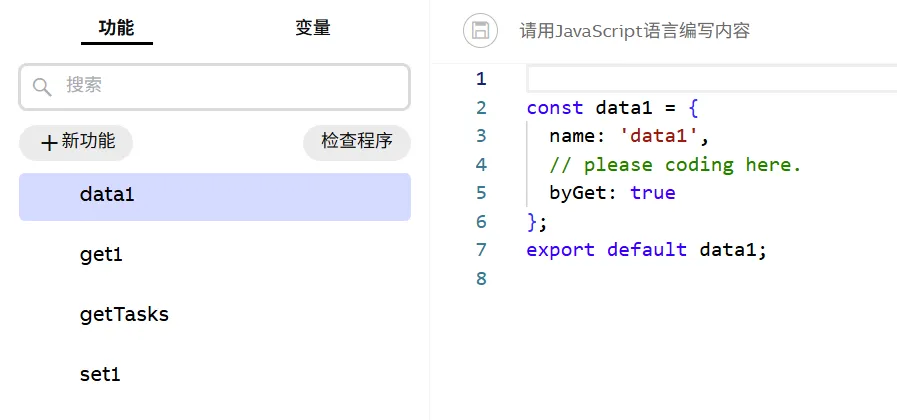
5. 为避免get1函数修改Switch值,触发Switch的onChange,创建一个data1(类型为data),并在get1函数执行时,将byGet设置为true
源代码和使用方法见:
链接: https://pan.baidu.com/s/12urQyNzu0a_028OFyOQcsQ?pwd=igt4 提取码: igt4 复制这段内容后打开百度网盘手机App,操作更方便哦