 夜雨聆风
夜雨聆风





仿节肢动物复眼 + AI!新型仿生视觉系统:165° 超广角、40μm 超高精度
点击蓝字
关注我们
关注并星标
从此不迷路

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
https://pmc.ncbi.nlm.nih.gov/articles/PMC12094235/pdf/sciadv.adt3505.pdf
计算机视觉研究院专栏
Column of Computer Vision Institute
PART/1
核心突破
核心突破:仿生复眼相机,小体积大视野
传统仿生复眼(BCE)要么像素少、要么成像模糊。本次研发的仿生复眼相机实现关键升级:
-
半球形结构,127 个小眼(ommatidia) -
视场角 165°×360°全景覆盖 -
有效像素430 万 -
空间分辨率40μm -
尺寸仅15mm×10mm×5.3mm
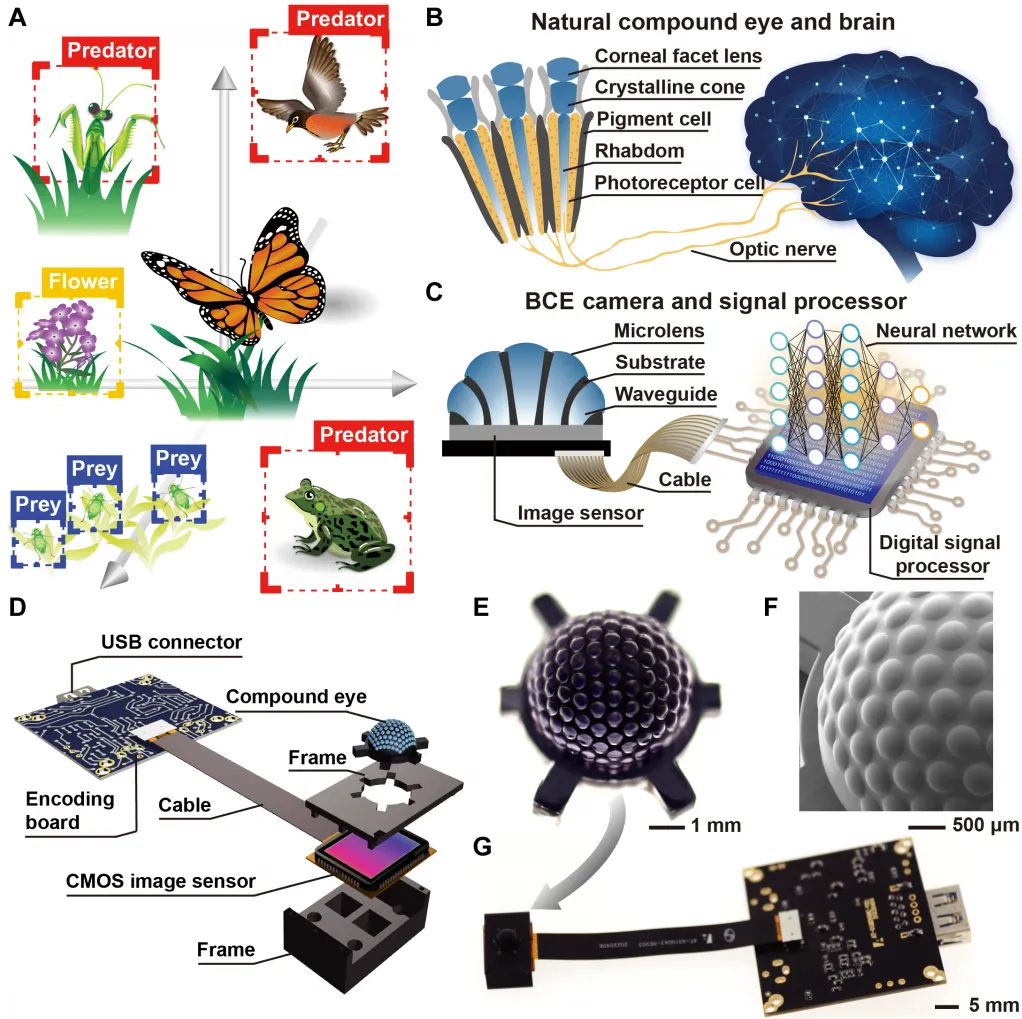
【BCE 相机与自然复眼结构对比】
相机采用微流控辅助 3D 打印制造,小眼自带微透镜 + 光波导,无串扰、低损耗,直接对接平面 CMOS 传感器,无需复杂中继镜头。
PART/2
AI 大脑
AI 大脑:三级多任务神经网络
系统模仿昆虫视觉神经,用三级深度学习处理复眼图像:
- 目标定位:YOLOv5s 识别目标、输出 3D 极坐标
- 图像重建:ResNet 修复畸变、还原清晰图像
- 分类识别:MobileNetV2 完成数字 / 颜色 / 图案识别
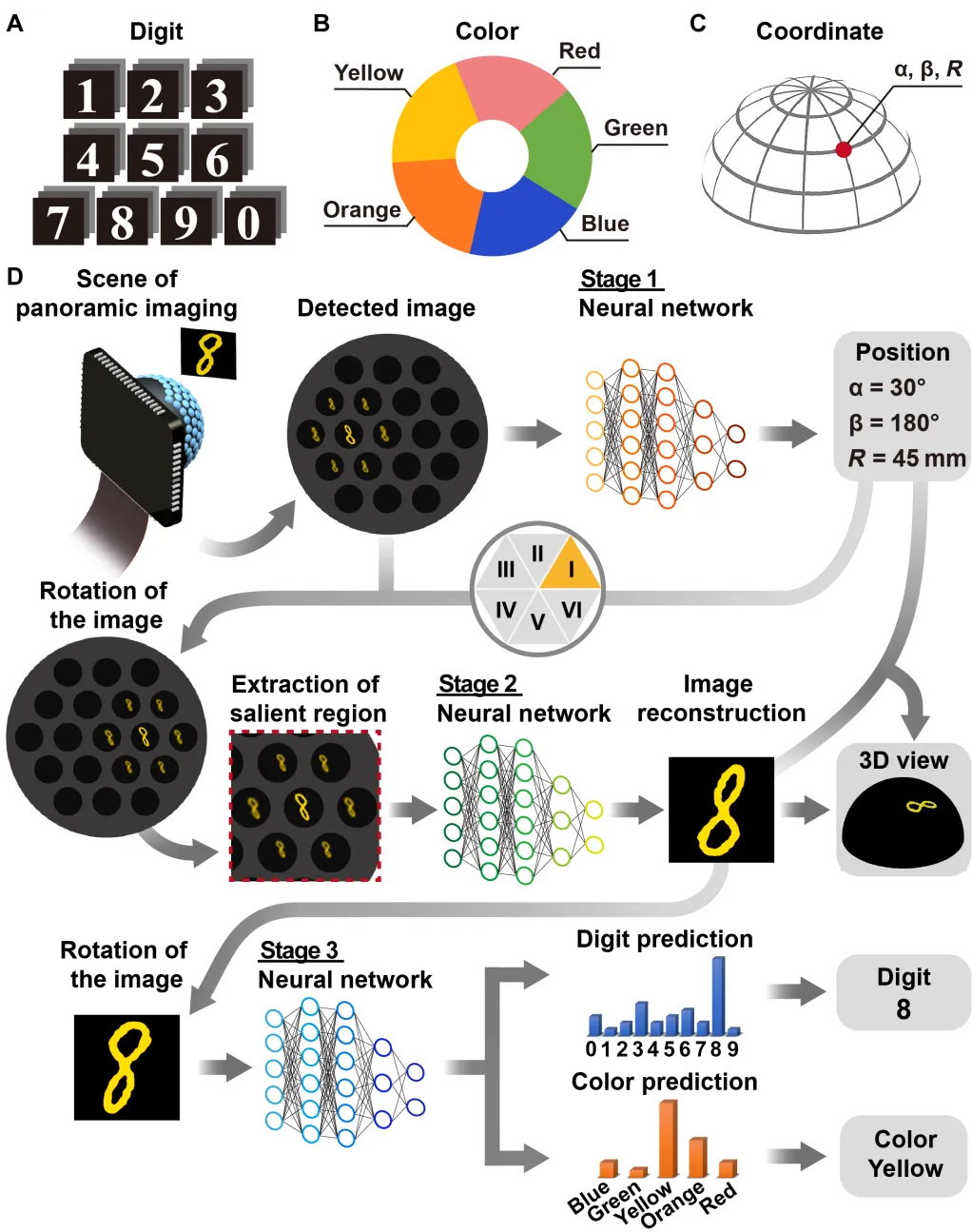
【多级视觉处理流程】
整套系统可同时完成:✅ 3D 空间定位✅ 高保真图像重建✅ 图案识别✅ 颜色分类✅ 多目标独立追踪
PART/3
实验
性能实测:超广角 + 高精度 + 强鲁棒性
1. 成像与分辨率
-
中心视场分辨率:22μm -
边缘视场分辨率:39μm -
景深范围:16–64mm -
角度感知速度:9.9×10³ deg/s
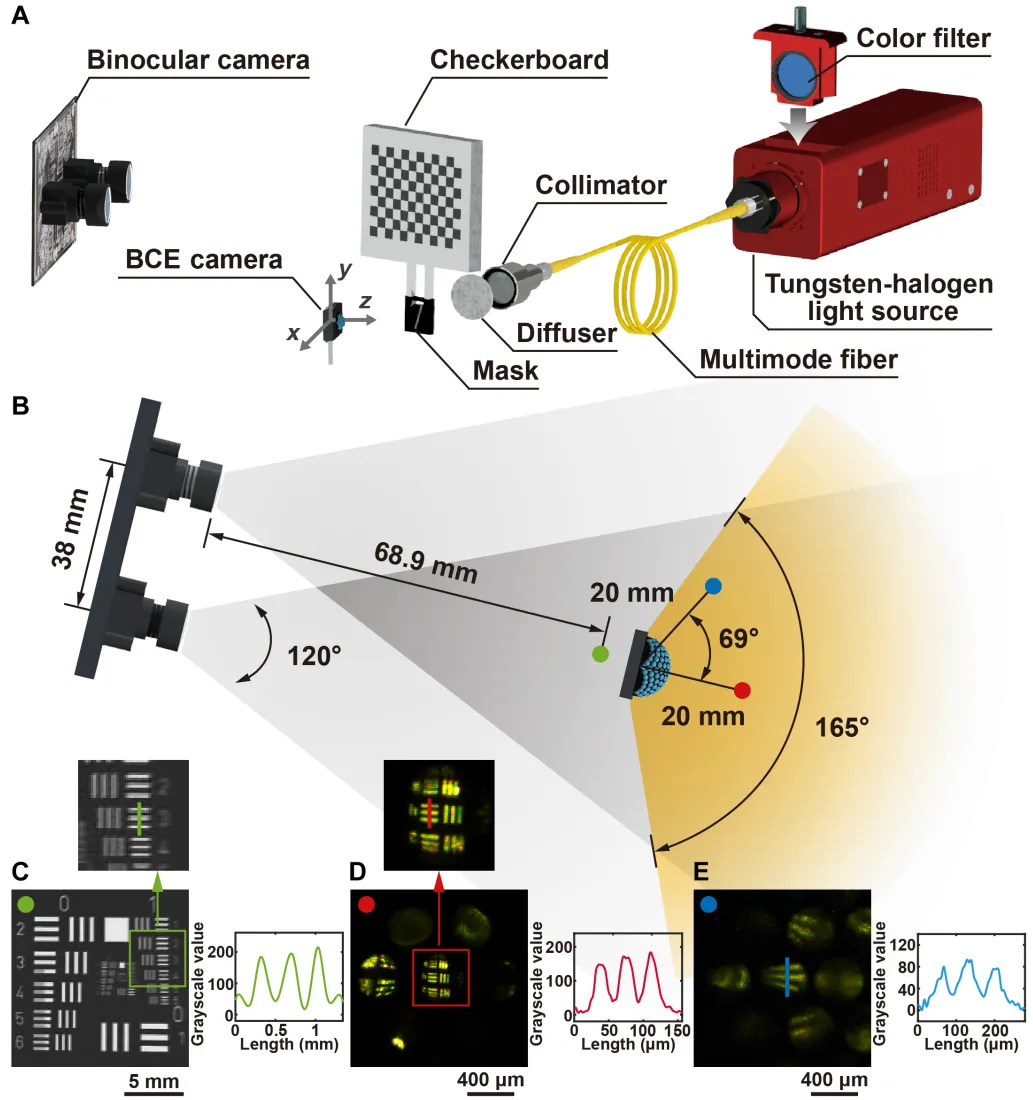
【系统分辨率测试】
2. 3D 定位与重建
-
角度预测误差:<2.6° -
距离预测误差:<2.3% -
图像结构相似度:>0.82 -
颜色相似度:>91.4%
3. 多目标 3D 追踪
可同时追踪多个微型目标,目标重叠也不干扰,轨迹预测精准匹配真实路径。
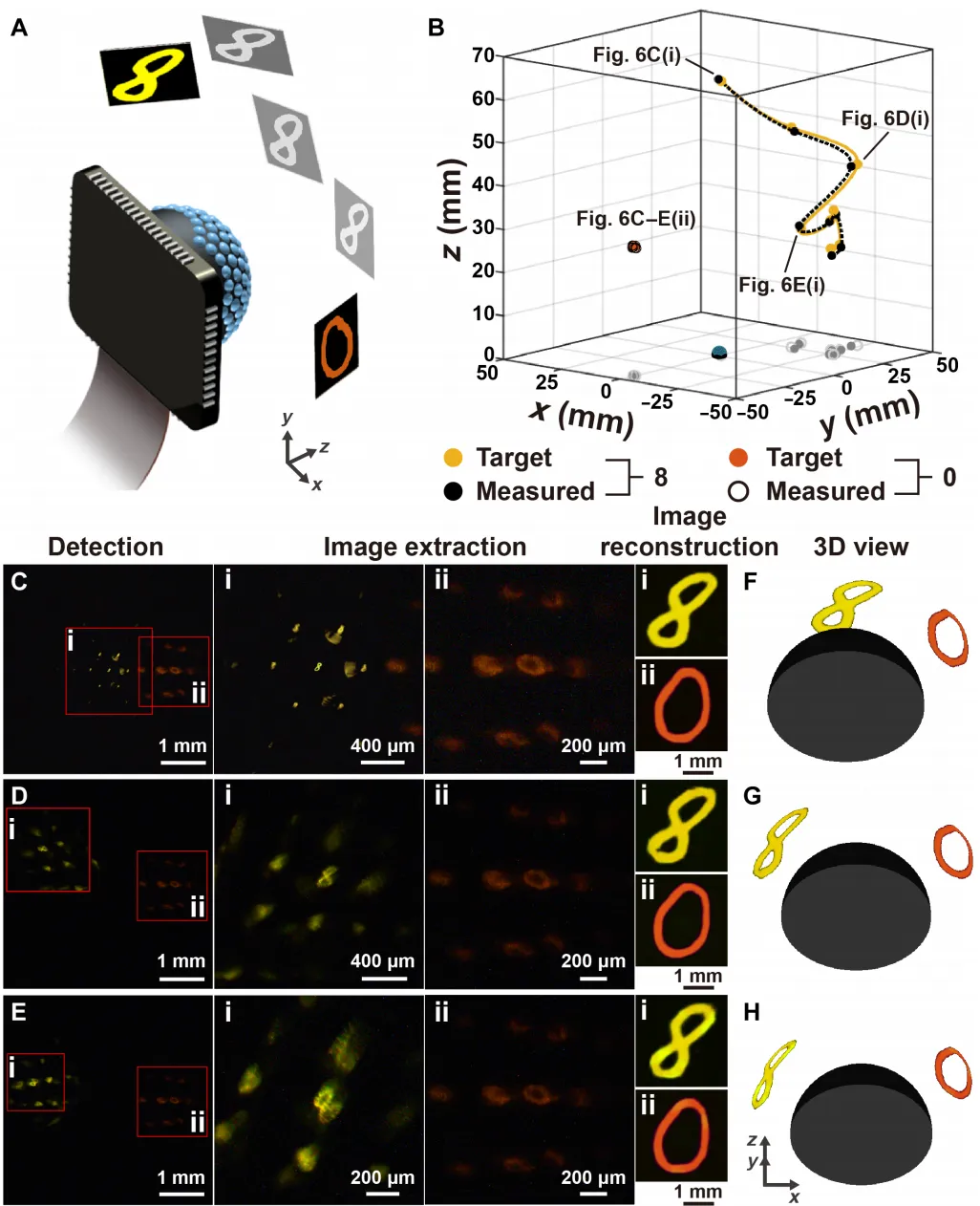
【双目标 3D 运动追踪结果】
4. 环境鲁棒性
在不同光照、散射、亮度条件下,依然稳定重建图像、准确识别图案。
PART/4
应用前景
应用前景:微型机器人、内窥镜、全域感知
这套仿生复眼 + AI系统,兼具:
-
超小体积 -
超广角全景 -
高精度成像 -
3D 感知 -
智能认知
可直接用于:
-
胶囊内窥镜 / 微创诊疗 -
微型无人机 / 机器人导航 -
狭小空间全景检测 -
工业全域监控
PART/5
总结
这项研究首次实现仿生复眼 + AI的协同赋能,解决了 “广角与精度不可兼得” 的行业难题,为下一代紧凑型、全景式、智能化视觉系统开辟全新路线。
未来通过优化结构、轻量化神经网络、集成光计算芯片,还能进一步更小、更快、更智能。


END

转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
🔗
-
YOLO-TLA:一种基于 YOLOv5 的高效轻量级小目标检测模型 -
ViT-YOLO:基于Transformer的用于目标检测的YOLO算法 -
SSMA-YOLO:一种轻量级的 YOLO 模型,具备增强的特征提取与融合能力,适用于无人机航拍的船舶图像检测 -
LUD-YOLO:一种用于无人机的新型轻量级目标检测网络 -
Gold-YOLO:基于聚合与分配机制的高效目标检测器 -
Drone-YOLO:一种有效的无人机图像目标检测 -
「无人机+AI」“空中城管” -
无人机+AI:光伏巡检自动化解决方案 -
无人机视角下多类别船舶检测及数量统计 -
机场项目:解决飞行物空间大小/纵横比、速度、遮挡等问题引起的实时目标检测问题 -
2PCNet:昼夜无监督域自适应目标检测(附原代码) -
YOLO-S:小目标检测的轻量级、精确的类YOLO网络 -
大改Yolo框架 | 能源消耗极低的目标检测新框架(附论文下载) -
改进的检测算法:用于高分辨率光学遥感图像目标检测