 夜雨聆风
夜雨聆风





机器人建模仿真靠什么?第六章解锁所有常用设计软件
机器人建模仿真靠什么?第六章解锁所有常用设计软件
上一章我们吃透了机器人的“大脑指令系统”——自动控制,搞懂了PID、LQR为啥能让机器人又稳又准。今天继续深耕《机器人技术入门》第六章,也是入门者最实用的一章:机器人常用设计软件。
不管是做机器人建模、动力学仿真,还是控制编程、电路调试,这一章都给你讲得明明白白。不用记复杂操作,先搞懂“什么场景用什么软件”,新手也能快速选对工具,少走弯路~
先理清:机器人设计,主要分4大场景
做机器人设计,本质就是4件事:画图纸(建模)、测性能(动力分析)、写程序(控制编程)、调电路(电路仿真)。每一件事,都有对应的“神器软件”,第六章重点讲的就是这4类核心工具,按需选用就好。
一、建模设计软件:给机器人画“骨架”
建模是第一步,相当于给机器人设计“身体蓝图”,不管是简单的小车,还是复杂的6轴机械臂,都要先靠建模软件画出来,精准确定尺寸、结构和装配关系。这一类软件,重点记4个最常用的:
1. AutoCAD:基础绘图“万能手”
入门级必备,主打二维绘图,也能做简单的三维设计。比如画机器人的零件图、装配示意图,标注尺寸、公差,操作简单易懂,是所有设计的基础。不管后续用什么高端软件,AutoCAD的基础操作都能帮你快速上手。
2. Pro/E(Creo):三维参数化建模“主力军”
工业设计最常用的软件之一,主打三维参数化建模。简单说,就是你改一个零件的尺寸,与之关联的装配体、图纸会自动同步修改,效率超高。适合做机器人的整体建模、零件装配,还能做简单的运动仿真,新手入门首选。
3. CATIA:高端设计“天花板”
堪称“工业设计全能王”,覆盖从概念设计到加工生产的全流程,尤其擅长复杂结构建模。比如航空航天、汽车领域的高端机器人,还有仿生机器人的复杂曲面设计,都离不开CATIA。优点是精度高、功能强,缺点是操作稍复杂,适合有一定基础后进阶使用。
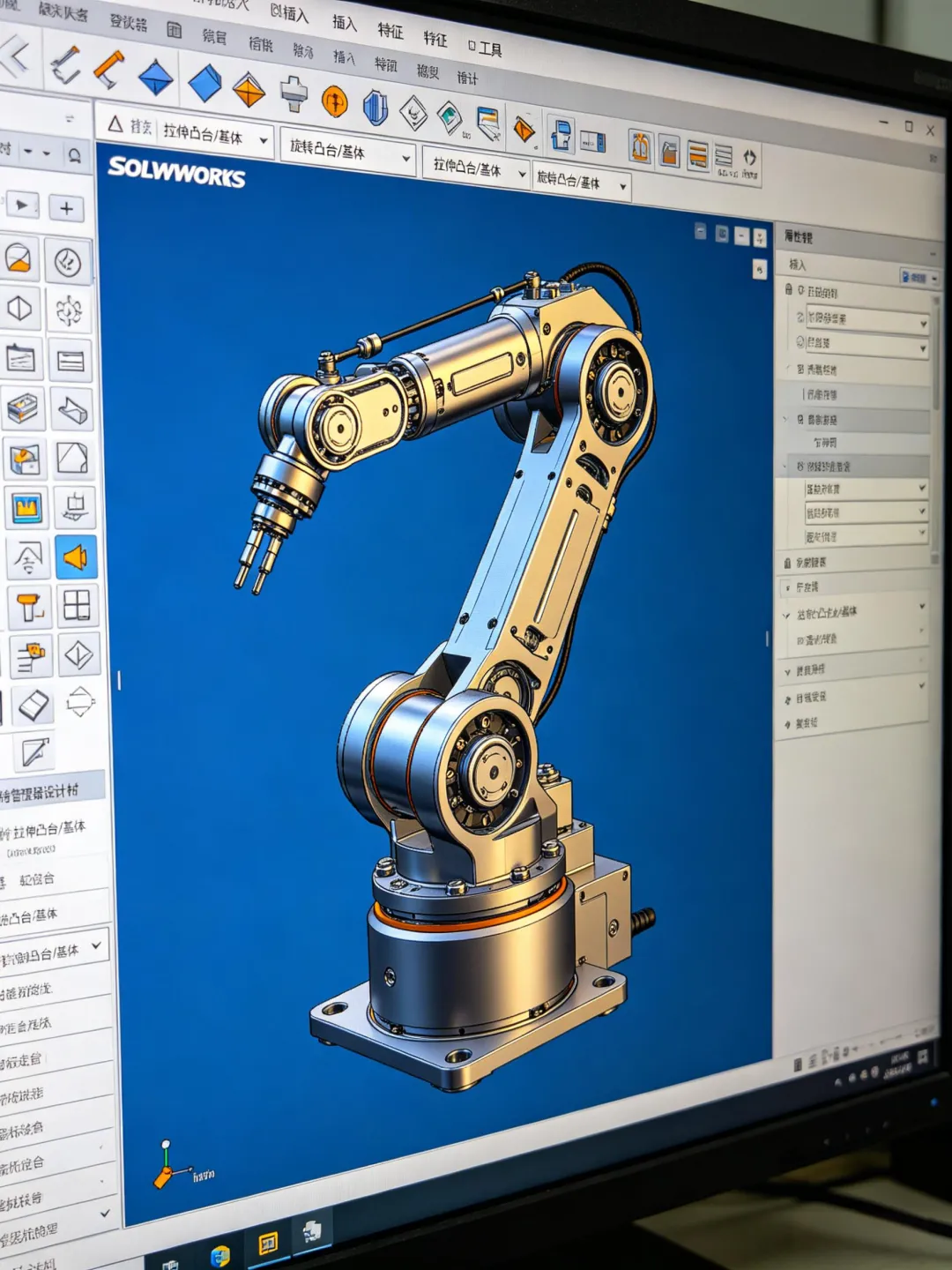
4. SolidWorks:新手友好“性价比之王”
Windows平台最易用的三维CAD软件,操作比Pro/E、CATIA简单,上手快,功能却不弱。既能做机器人建模、装配,也能做运动仿真、工程图导出,适合新手、机器人爱好者,还有高职院校的教学使用,兼顾实用性和易用性。
👉 新手选型建议:先学AutoCAD打基础,再学SolidWorks练建模,有进阶需求再学Pro/E或CATIA。

二、动力分析软件:测试机器人“性能极限”
建模完成后,不能直接做实物,得先靠动力分析软件“仿真测试”——比如机器人运动时会不会晃、关节受力够不够、速度和加速度是否达标,避免实物制作后出现问题,浪费时间和成本。这一类重点讲3个核心软件:
1. ADAMS:机械动力学仿真“专业户”
专门做机械系统动力学仿真,能精准模拟机器人的运动状态,输出位移、速度、加速度、关节力矩等数据。比如测试机械臂搬运重物时,关节会不会过载;小车运动时,底盘会不会抖动,都能靠ADAMS提前仿真验证,是工业机器人设计的必备工具。
2. ANSYS:有限元分析“全能工具”
主打多物理场有限元分析,简单说,就是检测机器人零件的强度、刚度、温度变化等。比如机器人的机械臂,长时间工作会不会变形、断裂;电机工作时会不会过热,都能靠ANSYS分析,确保设计的零件安全、耐用。
3. WorkBench:协同仿真“好帮手”
相当于ANSYS的“简化版+协同版”,操作更简单,还能和CAD软件(比如SolidWorks、Pro/E)双向联动——你在CAD里修改了模型,WorkBench里的仿真模型会自动同步,不用重新导入,大大提升仿真效率,适合新手做简单的仿真分析。
三、控制与编程软件:给机器人“写指令”
机器人的“大脑”需要靠编程来驱动,不管是简单的小车避障,还是复杂的机械臂轨迹控制,都需要对应的编程软件。这一类软件分两类,覆盖从底层编程到上层算法的全需求:
1. 算法与仿真:MATLAB/Simulink
机器人控制的“核心神器”,几乎所有机器人的算法开发、系统仿真都离不开它。比如我们上一章讲的PID控制、LQR控制,都能在Simulink里搭建模型,仿真测试控制效果;还有机器人的运动学、动力学建模,也能靠MATLAB的工具箱快速实现,新手入门必学。
2. 图形化编程:LabView
不用写复杂的代码,靠“拖拽模块”就能完成编程,主打数据采集与仪器控制。比如机器人的传感器数据采集、电机控制、监控界面设计,都能靠LabView快速实现,操作直观,适合不擅长写代码的新手,或者需要快速搭建控制系统的场景。
3. 底层编程:KeilC51/ADS
针对机器人的底层硬件编程,比如51单片机、ARM处理器。我们第三章讲的智能避障灭火小车,就是用KeilC51编写程序,控制单片机接收传感器信号、驱动电机动作。这类软件是机器人底层开发的基础,适合想深入了解机器人硬件与软件结合的入门者。
4. 上位机开发:VB/VC
用来设计机器人的“操作界面”,比如通过电脑界面控制机器人运动、查看传感器数据、设置参数。比如工业机器人的控制柜操作界面,很多都是用VB/VC开发的,适合有编程基础,想做上位机与机器人联动的场景。
四、电路仿真软件:调试机器人“电路系统”
机器人的电路的好坏,直接决定它能不能正常工作。电路仿真软件能提前调试电路,避免实物焊接后出现短路、断路、元件损坏等问题,重点记1个最常用的:
Proteus:单片机仿真“神器”
新手入门首选,既能做单片机/ARM仿真,也能设计PCB电路板。比如我们第三章的智能避障灭火小车,就能在Proteus里搭建电路、编写程序,仿真测试小车的避障、灭火功能,不用焊接实物就能验证电路是否正常,元件库超丰富(27000+种),满足大部分机器人的电路仿真需求。
本章超简总结(新手直接收藏)
第六章《机器人常用设计软件》,核心就是“按需选工具”,4类软件对应4大场景,记好这张“选型表”,新手也能不踩坑:
-
建模设计:AutoCAD(基础)、SolidWorks(新手)、Pro/E(工业)、CATIA(高端) -
动力分析:ADAMS(动力学)、ANSYS(强度)、WorkBench(协同仿真) -
控制编程:MATLAB(算法)、LabView(图形化)、KeilC51(底层) -
电路仿真:Proteus(单片机+PCB)
学完这一章,你就知道“做机器人需要用什么工具”,后续不管是动手做小项目,还是入门工业机器人设计,都能快速找到对应的软件,少走很多弯路。
下一章我们进入最后一章——第七章:机器人发展展望,聊聊机器人未来的发展方向,看看生物机器人、智能机器人会给我们的生活带来哪些改变。
机器人技术入门:
原来这些都是机器人!一文读懂工业、农业、军事等5大领域机器人真相
本篇文章内容来源于:机器人技术入门[魏巍主编]2014年版
图片由AI生成