
文档内容
第 10 讲 圆周运动
1.掌握描述圆周运动的物理量及它们之间的关系
2.理解向心力公式并能应用,圆周运动的动力学分析
3.了解物体做离心运动的条件
考点一 圆周运动中的运动学分析
1.线速度:描述物体圆周运动快慢的物理量.v==.
2.角速度:描述物体绕圆心转动快慢的物理量.ω==.
3.周期和频率:描述物体绕圆心转动快慢的物理量.T=,T=.
4.向心加速度:描述速度方向变化快慢的物理量.a=rω2==ωv=r.
n
5.相互关系:(1)v=ωr=r= 2π rf . (2)a==rω2=ωv=r=4π2f2r.
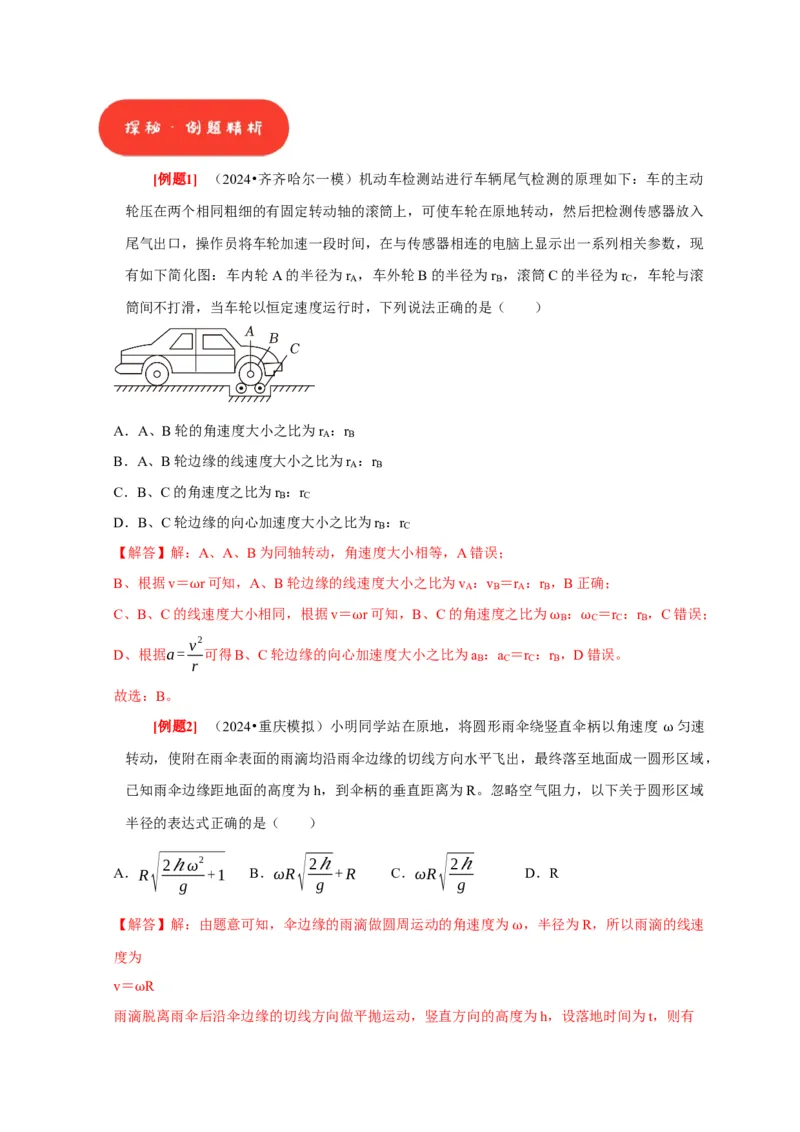
n[例题1] (2024•齐齐哈尔一模)机动车检测站进行车辆尾气检测的原理如下:车的主动
轮压在两个相同粗细的有固定转动轴的滚筒上,可使车轮在原地转动,然后把检测传感器放入
尾气出口,操作员将车轮加速一段时间,在与传感器相连的电脑上显示出一系列相关参数,现
有如下简化图:车内轮A的半径为r ,车外轮B的半径为r ,滚筒C的半径为r ,车轮与滚
A B C
筒间不打滑,当车轮以恒定速度运行时,下列说法正确的是( )
A.A、B轮的角速度大小之比为r :r
A B
B.A、B轮边缘的线速度大小之比为r :r
A B
C.B、C的角速度之比为r :r
B C
D.B、C轮边缘的向心加速度大小之比为r :r
B C
【解答】解:A、A、B为同轴转动,角速度大小相等,A错误;
B、根据v= r可知,A、B轮边缘的线速度大小之比为v :v =r :r ,B正确;
A B A B
C、B、C的线ω速度大小相同,根据v= r可知,B、C的角速度之比为 : =r :r ,C错误;
B C C B
v2
ω ω ω
D、根据a= 可得B、C轮边缘的向心加速度大小之比为a :a =r :r ,D错误。
B C C B
r
故选:B。
[例题2] (2024•重庆模拟)小明同学站在原地,将圆形雨伞绕竖直伞柄以角速度 匀速
转动,使附在雨伞表面的雨滴均沿雨伞边缘的切线方向水平飞出,最终落至地面成一圆形ω区域,
已知雨伞边缘距地面的高度为h,到伞柄的垂直距离为R。忽略空气阻力,以下关于圆形区域
半径的表达式正确的是( )
A.R
√2ℎω2
+1 B.ωR
√2ℎ
+R C.ωR
√2ℎ
D.R
g g g
【解答】解:由题意可知,伞边缘的雨滴做圆周运动的角速度为 ,半径为R,所以雨滴的线速
度为 ω
v= R
雨滴ω脱离雨伞后沿伞边缘的切线方向做平抛运动,竖直方向的高度为h,设落地时间为t,则有1
gt2=
ℎ
2
因为在水平方向做匀速直线运动,设水平方向的位移为x,则有x=vt
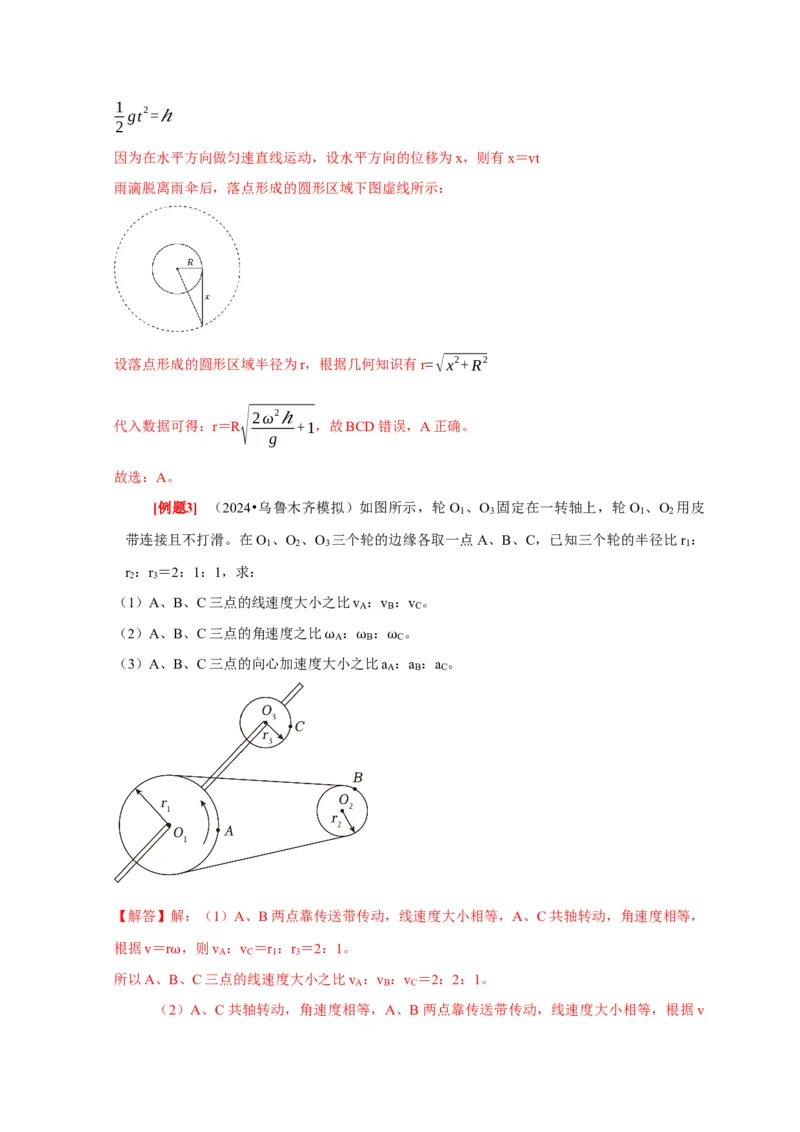
雨滴脱离雨伞后,落点形成的圆形区域下图虚线所示:
设落点形成的圆形区域半径为r,根据几何知识有r=√x2+R2
√2ω2
ℎ
代入数据可得:r=R +1,故BCD错误,A正确。
g
故选:A。
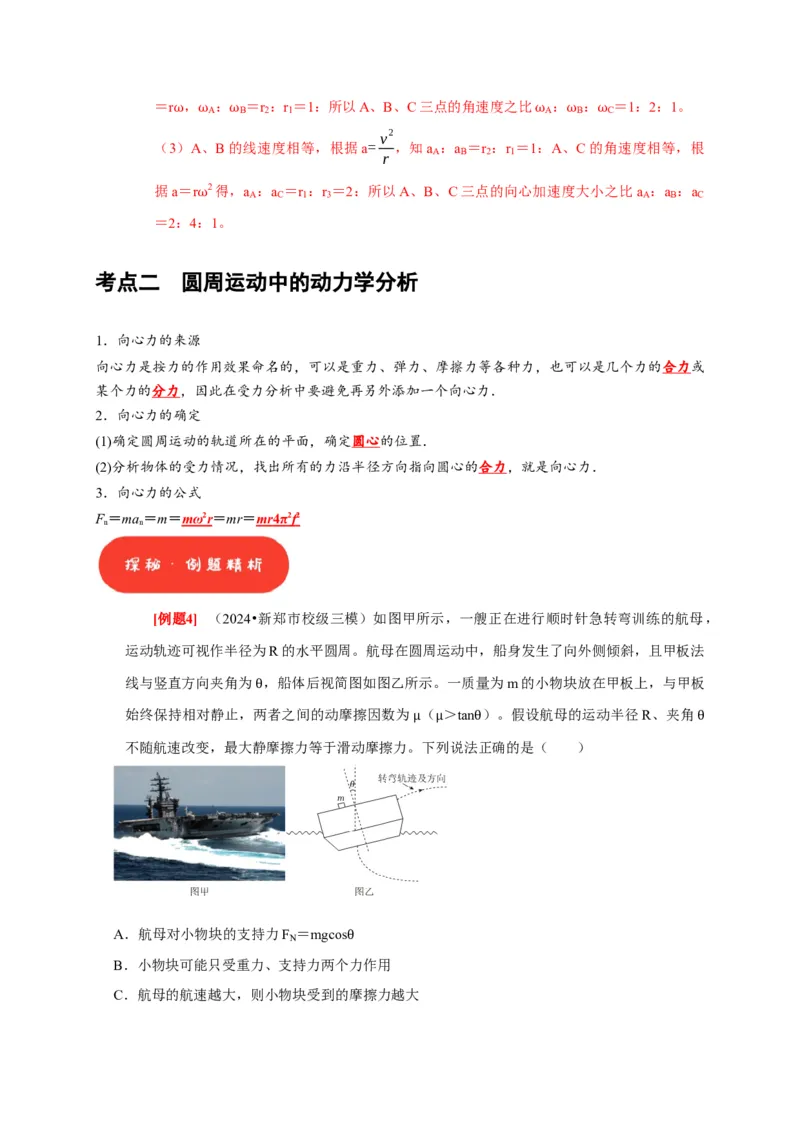
[例题3] (2024•乌鲁木齐模拟)如图所示,轮 O 、O 固定在一转轴上,轮O 、O 用皮
1 3 1 2
带连接且不打滑。在O 、O 、O 三个轮的边缘各取一点A、B、C,已知三个轮的半径比r :
1 2 3 1
r :r =2:1:1,求:
2 3
(1)A、B、C三点的线速度大小之比v :v :v 。
A B C
(2)A、B、C三点的角速度之比 : : 。
A B C
(3)A、B、C三点的向心加速度大ω小之ω比aω:a :a 。
A B C
【解答】解:(1)A、B两点靠传送带传动,线速度大小相等,A、C共轴转动,角速度相等,
根据v=r ,则v :v =r :r =2:1。
A C 1 3
所以A、Bω、C三点的线速度大小之比v :v :v =2:2:1。
A B C
(2)A、C共轴转动,角速度相等,A、B两点靠传送带传动,线速度大小相等,根据v=r , : =r :r =1:所以A、B、C三点的角速度之比 : : =1:2:1。
A B 2 1 A B C
ω ω ω
v2
ω ω ω
(3)A、B的线速度相等,根据a= ,知a :a =r :r =1:A、C的角速度相等,根
A B 2 1
r
据a=r 2得,a :a =r :r =2:所以A、B、C三点的向心加速度大小之比a :a :a
A C 1 3 A B C
=2:4:ω1。
考点二 圆周运动中的动力学分析
1.向心力的来源
向心力是按力的作用效果命名的,可以是重力、弹力、摩擦力等各种力,也可以是几个力的合力或
某个力的分力,因此在受力分析中要避免再另外添加一个向心力.
2.向心力的确定
(1)确定圆周运动的轨道所在的平面,确定圆心的位置.
(2)分析物体的受力情况,找出所有的力沿半径方向指向圆心的合力,就是向心力.
3.向心力的公式
F=ma =m= mω 2 r =mr= mr 4π 2 f 2
n n
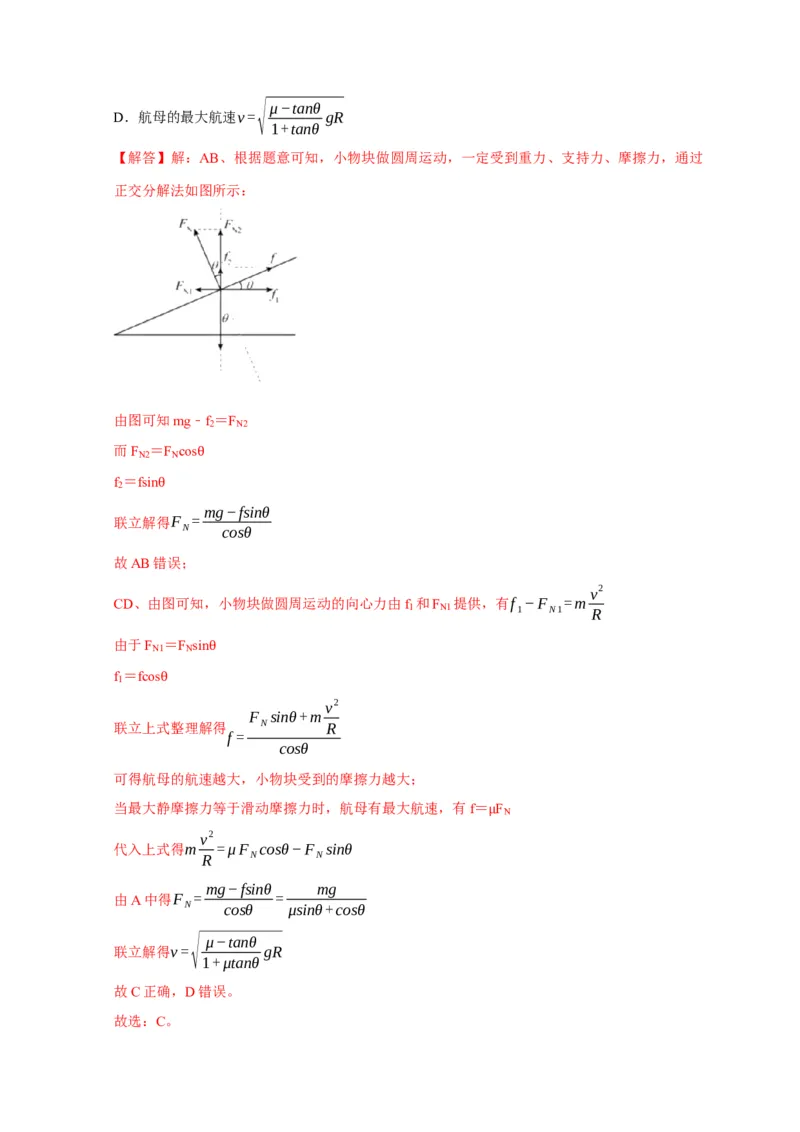
[例题4] (2024•新郑市校级三模)如图甲所示,一艘正在进行顺时针急转弯训练的航母,
运动轨迹可视作半径为R的水平圆周。航母在圆周运动中,船身发生了向外侧倾斜,且甲板法
线与竖直方向夹角为 ,船体后视简图如图乙所示。一质量为m的小物块放在甲板上,与甲板
始终保持相对静止,两θ 者之间的动摩擦因数为 ( >tan )。假设航母的运动半径R、夹角
不随航速改变,最大静摩擦力等于滑动摩擦力。μ下μ列说法θ正确的是( ) θ
A.航母对小物块的支持力F =mgcos
N
B.小物块可能只受重力、支持力两个θ力作用
C.航母的航速越大,则小物块受到的摩擦力越大√μ−tanθ
D.航母的最大航速v= gR
1+tanθ
【解答】解:AB、根据题意可知,小物块做圆周运动,一定受到重力、支持力、摩擦力,通过
正交分解法如图所示:
由图可知mg﹣f =F
2 N2
而F =F cos
N2 N
f =fsin θ
2
θ mg−fsinθ
联立解得F =
N cosθ
故AB错误;
v2
CD、由图可知,小物块做圆周运动的向心力由f 和F 提供,有f −F =m
1 N1 1 N1 R
由于F =F sin
N1 N
f =fcos θ
1
θ v2
F sinθ+m
联立上式整理解得 N R
f =
cosθ
可得航母的航速越大,小物块受到的摩擦力越大;
当最大静摩擦力等于滑动摩擦力时,航母有最大航速,有f= F
N
v2
μ
代入上式得m =μF cosθ−F sinθ
R N N
mg−fsinθ mg
由A中得F = =
N cosθ μsinθ+cosθ
√ μ−tanθ
联立解得v= gR
1+μtanθ
故C正确,D错误。
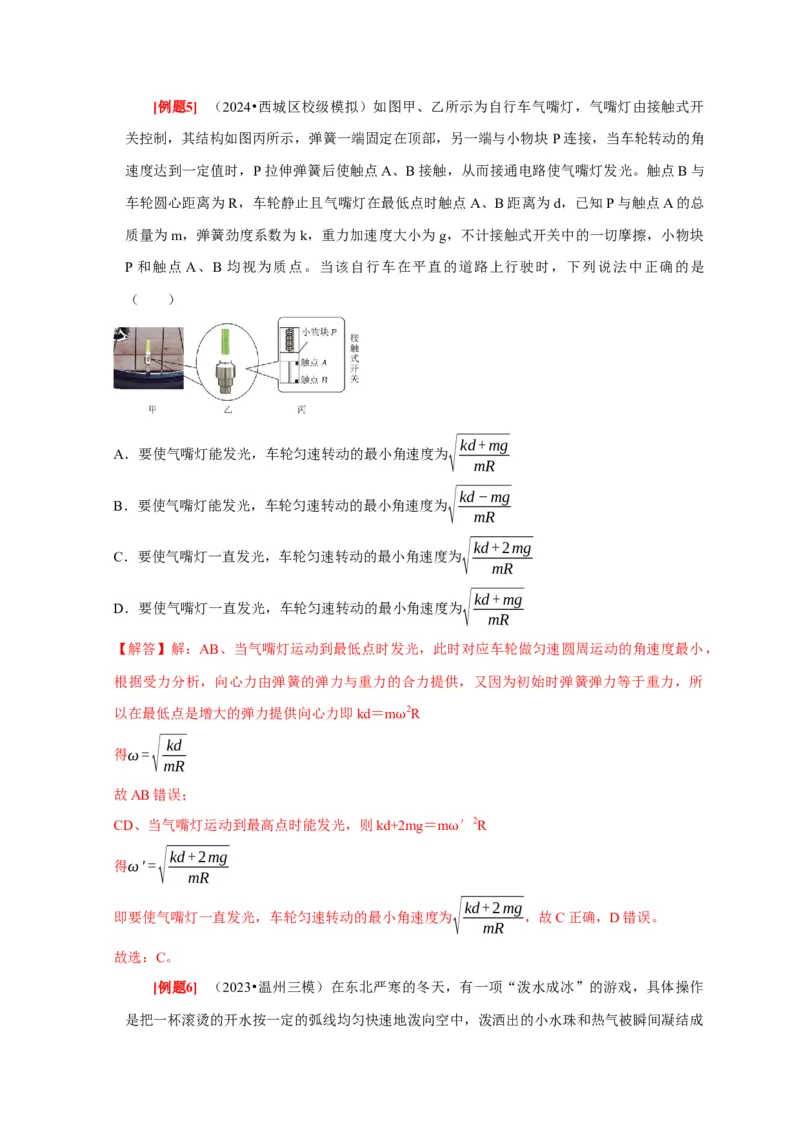
故选:C。[例题5] (2024•西城区校级模拟)如图甲、乙所示为自行车气嘴灯,气嘴灯由接触式开
关控制,其结构如图丙所示,弹簧一端固定在顶部,另一端与小物块 P连接,当车轮转动的角
速度达到一定值时,P拉伸弹簧后使触点A、B接触,从而接通电路使气嘴灯发光。触点B与
车轮圆心距离为R,车轮静止且气嘴灯在最低点时触点A、B距离为d,已知P与触点A的总
质量为m,弹簧劲度系数为k,重力加速度大小为g,不计接触式开关中的一切摩擦,小物块
P 和触点 A、B 均视为质点。当该自行车在平直的道路上行驶时,下列说法中正确的是
( )
√kd+mg
A.要使气嘴灯能发光,车轮匀速转动的最小角速度为
mR
√kd−mg
B.要使气嘴灯能发光,车轮匀速转动的最小角速度为
mR
√kd+2mg
C.要使气嘴灯一直发光,车轮匀速转动的最小角速度为
mR
√kd+mg
D.要使气嘴灯一直发光,车轮匀速转动的最小角速度为
mR
【解答】解:AB、当气嘴灯运动到最低点时发光,此时对应车轮做匀速圆周运动的角速度最小,
根据受力分析,向心力由弹簧的弹力与重力的合力提供,又因为初始时弹簧弹力等于重力,所
以在最低点是增大的弹力提供向心力即kd=m 2R
√ kd ω
得ω=
mR
故AB错误;
CD、当气嘴灯运动到最高点时能发光,则kd+2mg=m ′2R
√kd+2mg ω
得ω'=
mR
√kd+2mg
即要使气嘴灯一直发光,车轮匀速转动的最小角速度为 ,故C正确,D错误。
mR
故选:C。
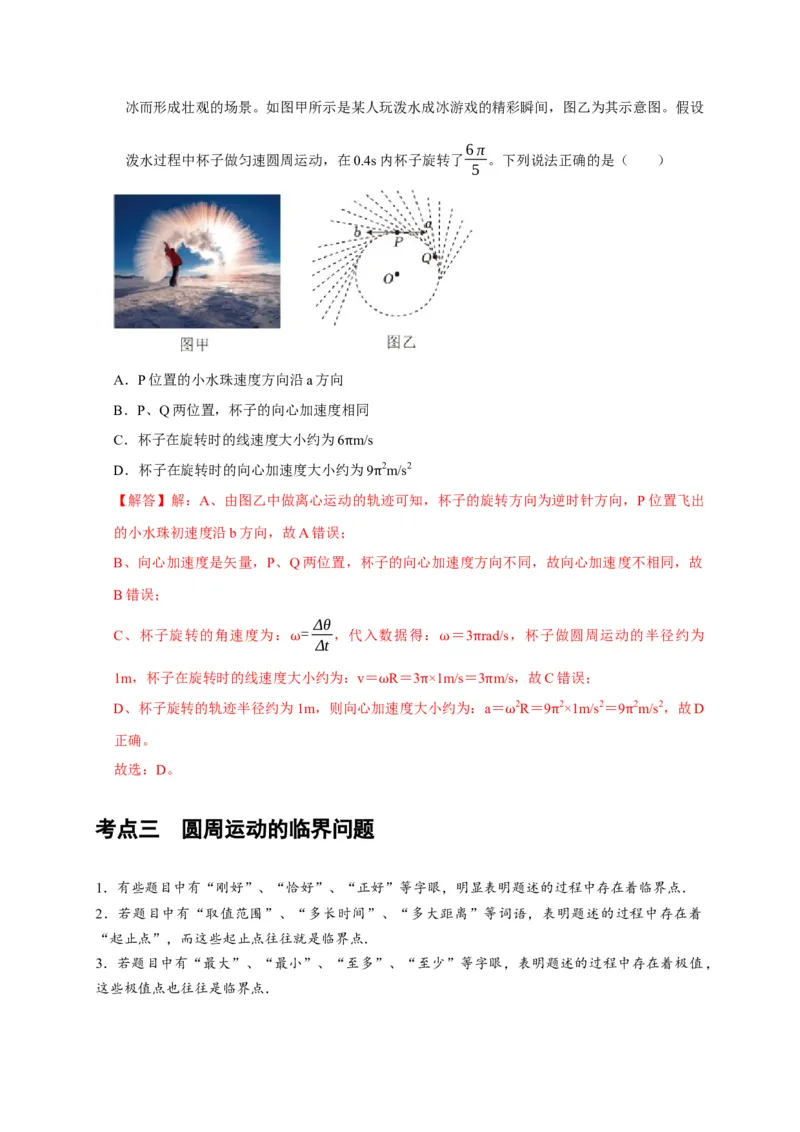
[例题6] (2023•温州三模)在东北严寒的冬天,有一项“泼水成冰”的游戏,具体操作
是把一杯滚烫的开水按一定的弧线均匀快速地泼向空中,泼洒出的小水珠和热气被瞬间凝结成冰而形成壮观的场景。如图甲所示是某人玩泼水成冰游戏的精彩瞬间,图乙为其示意图。假设
6π
泼水过程中杯子做匀速圆周运动,在0.4s内杯子旋转了 。下列说法正确的是( )
5
A.P位置的小水珠速度方向沿a方向
B.P、Q两位置,杯子的向心加速度相同
C.杯子在旋转时的线速度大小约为6 m/s
D.杯子在旋转时的向心加速度大小约π为9 2m/s2
【解答】解:A、由图乙中做离心运动的轨π迹可知,杯子的旋转方向为逆时针方向,P位置飞出
的小水珠初速度沿b方向,故A错误;
B、向心加速度是矢量,P、Q两位置,杯子的向心加速度方向不同,故向心加速度不相同,故
B错误;
Δθ
C、杯子旋转的角速度为: = ,代入数据得: =3 rad/s,杯子做圆周运动的半径约为
Δt
ω ω π
1m,杯子在旋转时的线速度大小约为:v= R=3 ×1m/s=3 m/s,故C错误;
D、杯子旋转的轨迹半径约为1m,则向心加ω速度大π小约为:aπ= 2R=9 2×1m/s2=9 2m/s2,故D
正确。 ω π π
故选:D。
考点三 圆周运动的临界问题
1.有些题目中有“刚好”、“恰好”、“正好”等字眼,明显表明题述的过程中存在着临界点.
2.若题目中有“取值范围”、“多长时间”、“多大距离”等词语,表明题述的过程中存在着
“起止点”,而这些起止点往往就是临界点.
3.若题目中有“最大”、“最小”、“至多”、“至少”等字眼,表明题述的过程中存在着极值,
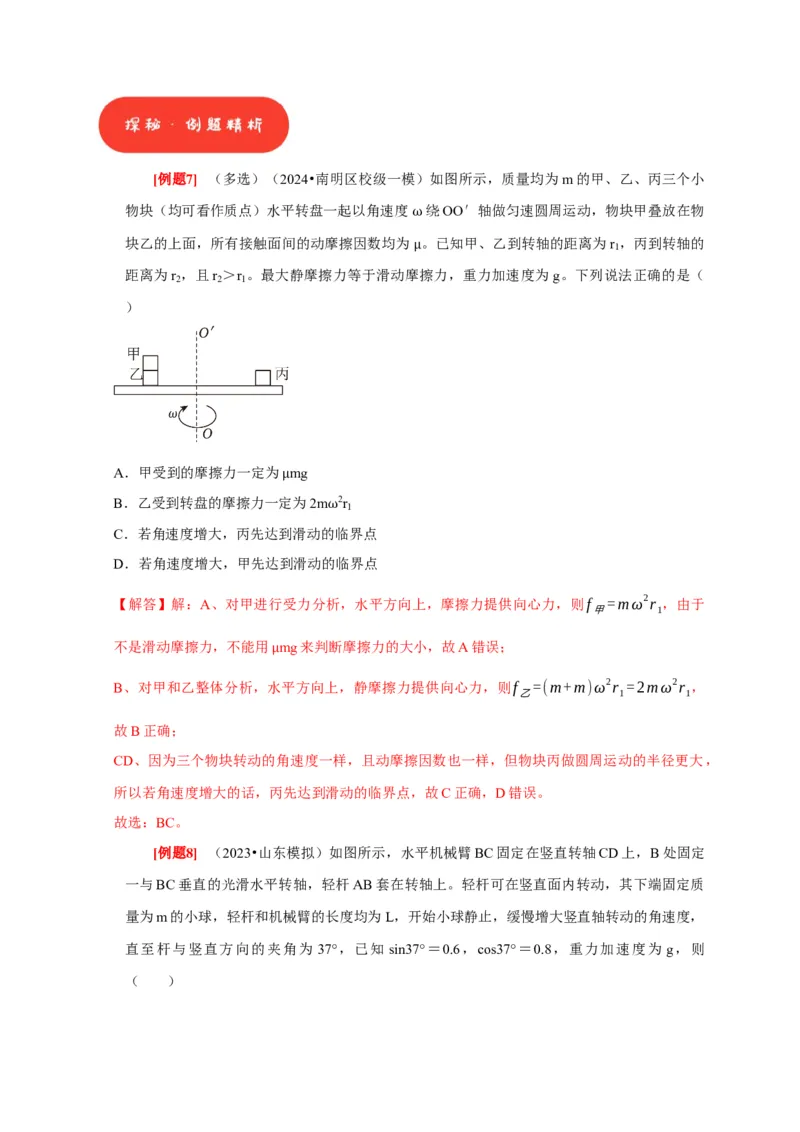
这些极值点也往往是临界点.[例题7] (多选)(2024•南明区校级一模)如图所示,质量均为m的甲、乙、丙三个小
物块(均可看作质点)水平转盘一起以角速度 绕OO′轴做匀速圆周运动,物块甲叠放在物
块乙的上面,所有接触面间的动摩擦因数均为ω。已知甲、乙到转轴的距离为r ,丙到转轴的
1
距离为r ,且r >r 。最大静摩擦力等于滑动摩μ擦力,重力加速度为g。下列说法正确的是(
2 2 1
)
A.甲受到的摩擦力一定为 mg
B.乙受到转盘的摩擦力一定μ为2m 2r
1
C.若角速度增大,丙先达到滑动的ω临界点
D.若角速度增大,甲先达到滑动的临界点
【解答】解:A、对甲进行受力分析,水平方向上,摩擦力提供向心力,则f =mω2r ,由于
甲 1
不是滑动摩擦力,不能用 mg来判断摩擦力的大小,故A错误;
μ
B、对甲和乙整体分析,水平方向上,静摩擦力提供向心力,则f =(m+m)ω2r =2mω2r ,
乙 1 1
故B正确;
CD、因为三个物块转动的角速度一样,且动摩擦因数也一样,但物块丙做圆周运动的半径更大,
所以若角速度增大的话,丙先达到滑动的临界点,故C正确,D错误。
故选:BC。
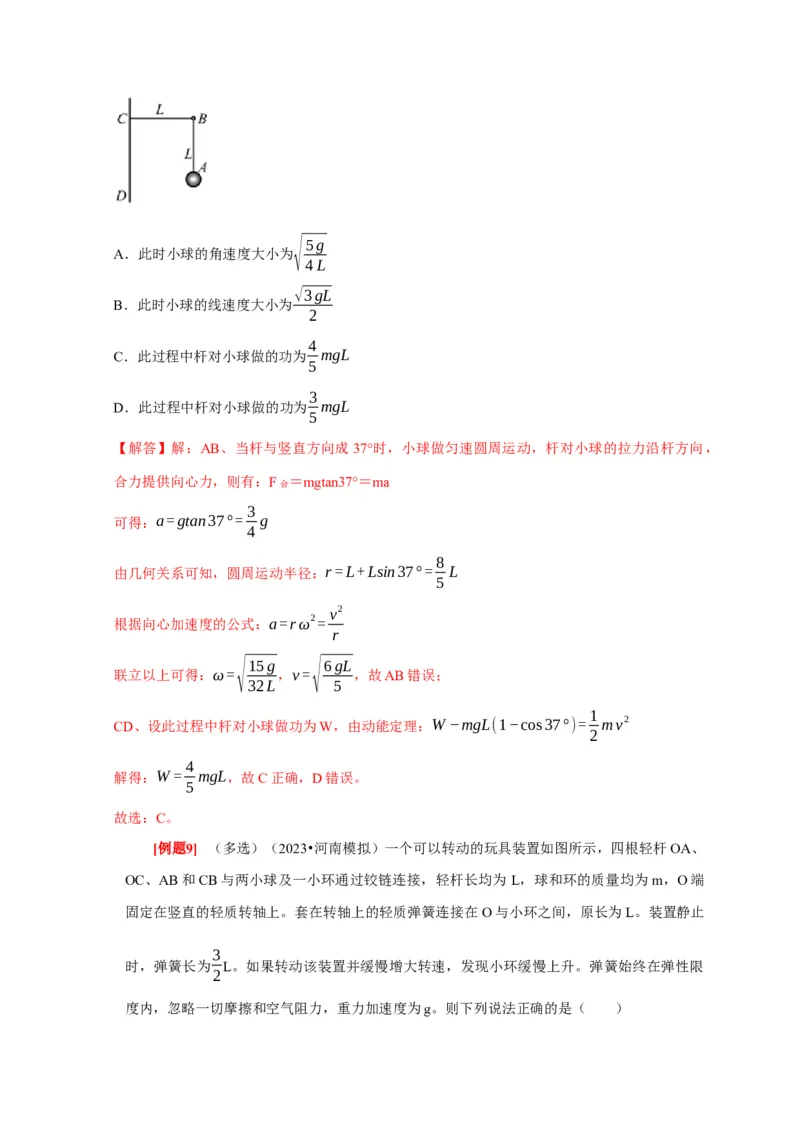
[例题8] (2023•山东模拟)如图所示,水平机械臂BC固定在竖直转轴CD上,B处固定
一与BC垂直的光滑水平转轴,轻杆AB套在转轴上。轻杆可在竖直面内转动,其下端固定质
量为m的小球,轻杆和机械臂的长度均为L,开始小球静止,缓慢增大竖直轴转动的角速度,
直至杆与竖直方向的夹角为 37°,已知 sin37°=0.6,cos37°=0.8,重力加速度为 g,则
( )√5g
A.此时小球的角速度大小为
4L
√3gL
B.此时小球的线速度大小为
2
4
C.此过程中杆对小球做的功为 mgL
5
3
D.此过程中杆对小球做的功为 mgL
5
【解答】解:AB、当杆与竖直方向成37°时,小球做匀速圆周运动,杆对小球的拉力沿杆方向,
合力提供向心力,则有:F合 =mgtan37°=ma
3
可得:a=gtan37°= g
4
8
由几何关系可知,圆周运动半径:r=L+Lsin37°= L
5
v2
根据向心加速度的公式:a=rω2=
r
√15g √6gL
联立以上可得:ω= ,v= ,故AB错误;
32L 5
1
CD、设此过程中杆对小球做功为W,由动能定理:W−mgL(1−cos37°)= mv2
2
4
解得:W = mgL,故C正确,D错误。
5
故选:C。
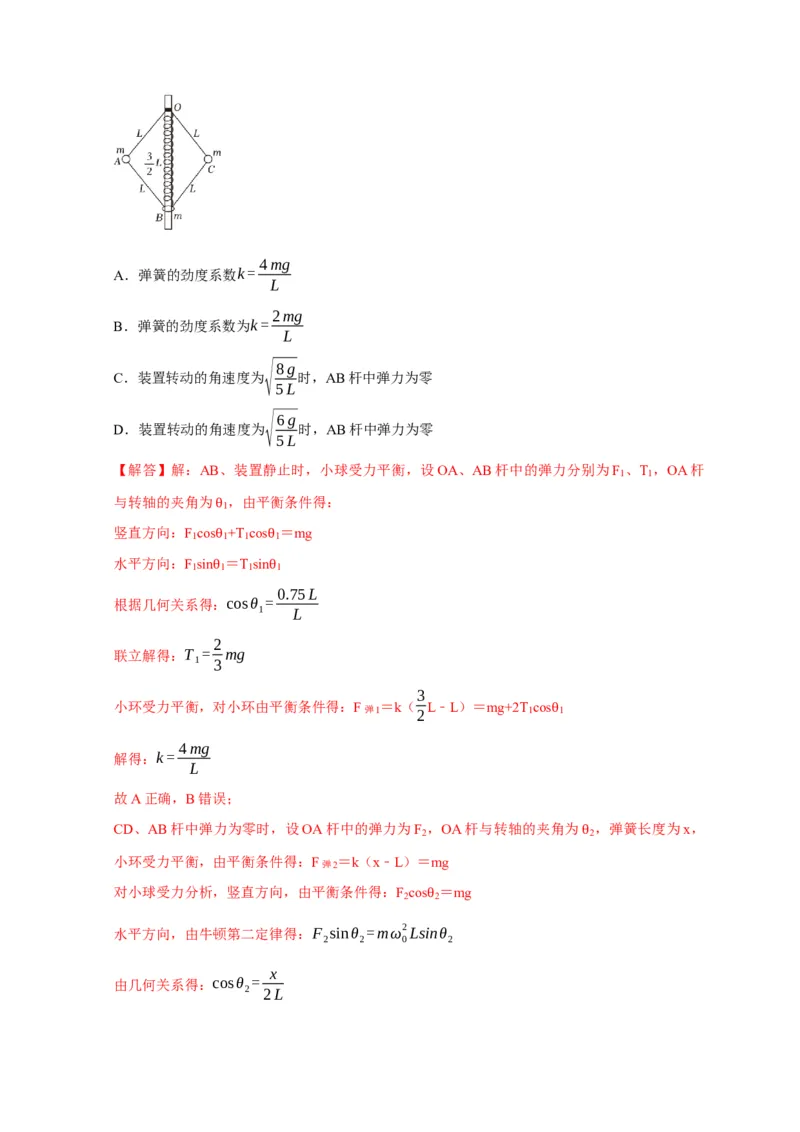
[例题9] (多选)(2023•河南模拟)一个可以转动的玩具装置如图所示,四根轻杆OA、
OC、AB和CB与两小球及一小环通过铰链连接,轻杆长均为 L,球和环的质量均为m,O端
固定在竖直的轻质转轴上。套在转轴上的轻质弹簧连接在 O与小环之间,原长为L。装置静止
3
时,弹簧长为 L。如果转动该装置并缓慢增大转速,发现小环缓慢上升。弹簧始终在弹性限
2
度内,忽略一切摩擦和空气阻力,重力加速度为g。则下列说法正确的是( )4mg
A.弹簧的劲度系数k=
L
2mg
B.弹簧的劲度系数为k=
L
√8g
C.装置转动的角速度为 时,AB杆中弹力为零
5L
√6g
D.装置转动的角速度为 时,AB杆中弹力为零
5L
【解答】解:AB、装置静止时,小球受力平衡,设OA、AB杆中的弹力分别为F 、T ,OA杆
1 1
与转轴的夹角为 ,由平衡条件得:
1
竖直方向:F cosθ +T cos =mg
1 1 1 1
水平方向:F sinθ=T sinθ
1 1 1 1
θ θ0.75L
根据几何关系得:cosθ =
1 L
2
联立解得:T = mg
1 3
3
小环受力平衡,对小环由平衡条件得:F弹1 =k(
2
L﹣L)=mg+2T
1
cos
1
θ
4mg
解得:k=
L
故A正确,B错误;
CD、AB杆中弹力为零时,设OA杆中的弹力为F ,OA杆与转轴的夹角为 ,弹簧长度为x,
2 2
小环受力平衡,由平衡条件得:F弹2 =k(x﹣L)=mg θ
对小球受力分析,竖直方向,由平衡条件得:F cos =mg
2 2
θ
水平方向,由牛顿第二定律得:F sinθ =mω2Lsinθ
2 2 0 2
x
由几何关系得:cosθ =
2 2L√8g
联立解得:ω =
0 5L
故C正确,D错误。
故选:AC。
考点四 竖直平面内圆周运动绳、杆模型
1.在竖直平面内做圆周运动的物体,按运动到轨道最高点时的受力情况可分为两类:一是无支撑
(如球与绳连接、沿内轨道运动的过山车等),称为“绳(环)约束模型”,二是有支撑(如球与杆连接、
在弯管内的运动等),称为“杆(管)约束模型”.
2.绳、杆模型涉及的临界问题
绳模型 杆模型
常见类型
均是没有支撑的小球
均是有支撑的小球
过最高点的 由mg=m得
由小球恰能做圆周运动得v =0
临
临界条件 v =
临
(1)当v=0时,F =mg,F 为支持力,沿
N N
(1)过最高点时,v≥,F +mg
N
半径背离圆心
=m,绳、圆轨道对球产生弹
(2)当0时,F +mg=m,F 指向圆心并
N N
圆轨道
随v的增大而增大
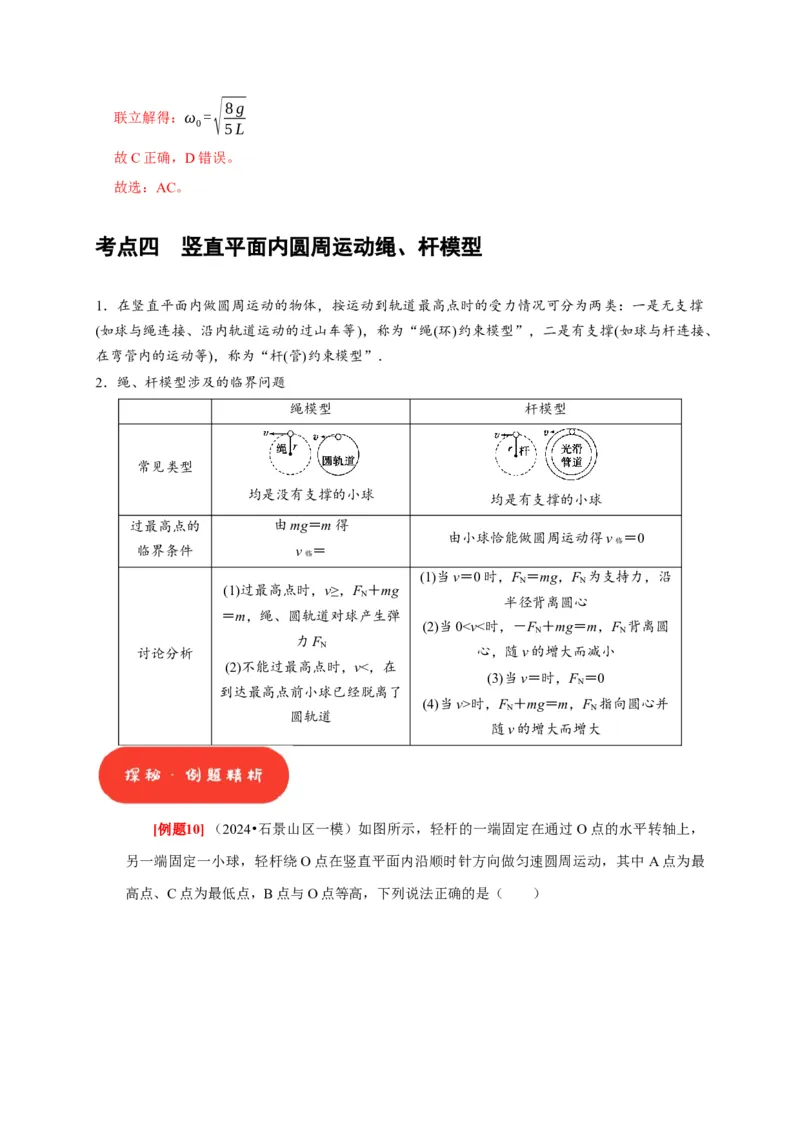
[例题10](2024•石景山区一模)如图所示,轻杆的一端固定在通过 O点的水平转轴上,
另一端固定一小球,轻杆绕O点在竖直平面内沿顺时针方向做匀速圆周运动,其中 A点为最
高点、C点为最低点,B点与O点等高,下列说法正确的是( )A.小球经过A点时,所受杆的作用力一定竖直向下
B.小球经过B点时,所受杆的作用力沿着BO方向
C.从A点到C点的过程,杆对小球的作用力不做功
D.从A点到C点的过程,小球重力的功率先增大后减小
【解答】解:A、小球经过A点时,由合外力提供向心力,当小球速度较大时
mv2
若 >mg,则小球所受杆的作用力竖直向下;
r
mv2
当小球速度较小时,若 <mg,则小球所受杆的作用力竖直向上;
r
mv2
当小球速度满足 =mg
r
则杆对小球无作用力,故A错误;
B、小球经过B点时,由合外力提供向心力,小球受重力和杆给的作用力,则小球所受杆的作用
力为右上方,杆的作用力一定不会沿着BO方向,故B错误;
C、从A到C的过程中,重力做正功,根据动能定理得W
G
+W杆 =ΔE
k
=0,则W杆 =﹣W
G
,故
杆对小球的作用力做负功,故C错误;
D、A点和C点处重力与速度方向垂直,则小球重力的功率为0,B点处重力与速度共线,故重
力功率不为0,则从A点到C点的过程,小球重力的功率先增大再减小,故D正确。
故选:D。
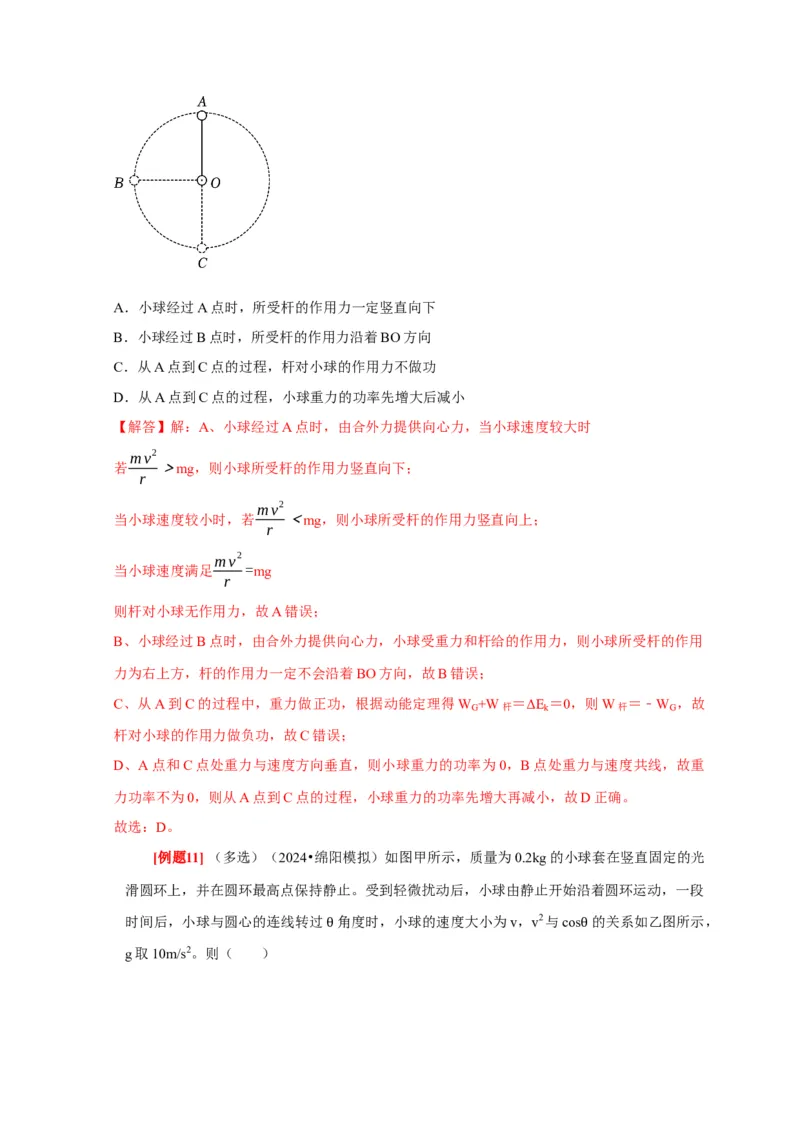
[例题11] (多选)(2024•绵阳模拟)如图甲所示,质量为0.2kg的小球套在竖直固定的光
滑圆环上,并在圆环最高点保持静止。受到轻微扰动后,小球由静止开始沿着圆环运动,一段
时间后,小球与圆心的连线转过 角度时,小球的速度大小为v,v2与cos 的关系如乙图所示,
g取10m/s2。则( ) θ θA.圆环半径为0.6m
π
B.θ= 时,小球所受合力为4N
2
C.0≤ ≤ 过程中,圆环对小球的作用力一直增大
D.0≤θ≤π过程中,圆环对小球的作用力先减小后增大
【解答】 θ 解 π :A、小球下滑过程由机械能守恒定律有mg(R−Rcosθ)= 1 mv2
2
π
当 = 时,小球的速度平方为12m2/s2,代入公式得R=0.6m,故A正确;
2
θ
π
B、当 = 时,小球的速度平方为 12m2/s2,此时是圆环对小球的弹力提供向心力,有 N
2
θ
mv2 0.2×12
= = N=4N
R 0.6
小球还受竖直向下的重力,所以小球所受合力为 F=√N2+(mg) 2=√42+(0.2×10) 2N=2√5N,
故B错误;
π v2
CD、当0<θ< 时,有mgcosθ−N=m
2 R
可知随 的增大,同时v也增大,所以N必须减小,
π θ v2
当 <θ<π时,有N−mgcos(180°−θ)=m
2 R
可知随 的增大,同时v也增大,所以N必须增大,所以0≤ ≤ 过程中,圆环对小球的作用
力先减小θ后增大,故C错误,D正确。 θ π
故选:AD。
[例题12](2024•雨花区校级模拟)如图所示,半径R=1m的光滑圆环形滑杆MNP竖直
固定放置,左侧端点M和圆心O 的连线与竖直方向夹角的余弦值cos =0.15,右侧端点P和
1
圆心O 、O 在同一水平线上,P点的切线沿竖直方向。现有一质量m =θ0.2kg的小橡胶环A以
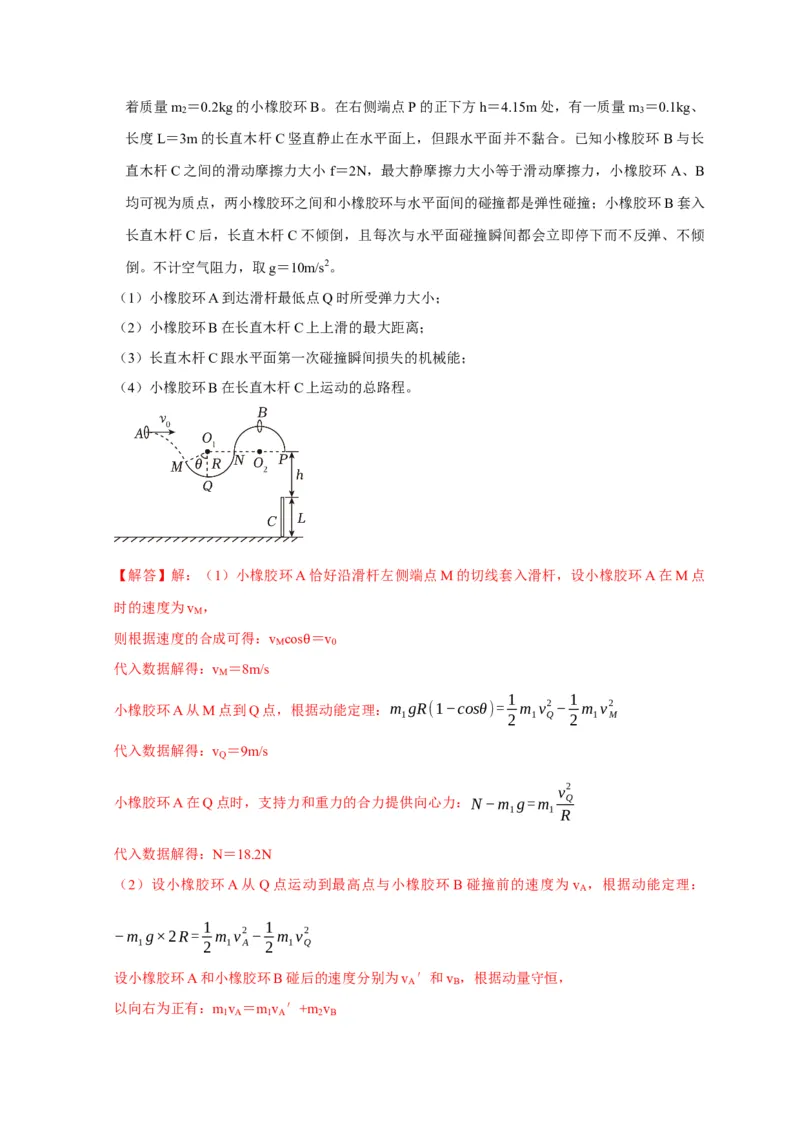
1 2 1
v =1.2m/s的初速度水平抛出,恰好沿滑杆左侧端点M的切线套入滑杆,在滑杆的最高点静止
0着质量m =0.2kg的小橡胶环B。在右侧端点P的正下方h=4.15m处,有一质量m =0.1kg、
2 3
长度L=3m的长直木杆C竖直静止在水平面上,但跟水平面并不黏合。已知小橡胶环 B与长
直木杆C之间的滑动摩擦力大小f=2N,最大静摩擦力大小等于滑动摩擦力,小橡胶环 A、B
均可视为质点,两小橡胶环之间和小橡胶环与水平面间的碰撞都是弹性碰撞;小橡胶环B套入
长直木杆C后,长直木杆C不倾倒,且每次与水平面碰撞瞬间都会立即停下而不反弹、不倾
倒。不计空气阻力,取g=10m/s2。
(1)小橡胶环A到达滑杆最低点Q时所受弹力大小;
(2)小橡胶环B在长直木杆C上上滑的最大距离;
(3)长直木杆C跟水平面第一次碰撞瞬间损失的机械能;
(4)小橡胶环B在长直木杆C上运动的总路程。
【解答】解:(1)小橡胶环A恰好沿滑杆左侧端点M的切线套入滑杆,设小橡胶环A在M点
时的速度为v ,
M
则根据速度的合成可得:v cos =v
M 0
代入数据解得:v =8m/s θ
M
1 1
小橡胶环A从M点到Q点,根据动能定理:m gR(1−cosθ)= m v2 − m v2
1 2 1 Q 2 1 M
代入数据解得:v =9m/s
Q
v2
小橡胶环A在Q点时,支持力和重力的合力提供向心力:N−m g=m Q
1 1 R
代入数据解得:N=18.2N
(2)设小橡胶环A从Q点运动到最高点与小橡胶环B碰撞前的速度为v ,根据动能定理:
A
1 1
−m g×2R= m v2 − m v2
1 2 1 A 2 1 Q
设小橡胶环A和小橡胶环B碰后的速度分别为v ′和v ,根据动量守恒,
A B
以向右为正有:m v =m v ′+m v
1 A 1 A 2 B1 1 1
由机械能守恒可得: m v2 = m v'2 + m v2
2 1 A 2 1 A 2 2 B
小橡胶环 B,从碰撞后到与长直木杆接触前瞬间,设接触前速度为 v,根据动能定理:
1 1
m g(R+ ℎ)= m v2− m v2
2 2 2 2 2 B
代入数据联立解得:v=12m/s
小橡胶环B沿长直木杆下滑时,长直木杆静止不动,根据受力分析可得:m g=f
2
可得小橡胶环B在长直木杆C上受力平衡做匀速直线运动,小橡胶环B做匀速直线运动;小橡
胶环B沿长直木杆上滑时,小橡胶环B做匀减速直线运动,长直木杆C做匀加速直线运动,设
共速时速度大小为v ,对小橡胶环B有:m g+f=m a
1 2 2 1
根据速度—时间公式:v =v﹣a t
1 11
对长直木杆有:f﹣m g=m a
3 3 2
同理有:v =a t
1 21
v
位移:x = 2t
1 2 1
v+v v
此时小橡胶环B上滑的距离最大:s = 1t − 1t
1 2 1 2 1
v2 122
代入数据得:s = = m=2.4m
1 6a 6×10
2
(3)小橡胶环B与长直木杆C共速后一起做竖直上抛,直到长直木杆跟水平面第一次碰撞前,
则由速度—位移公式有:v'2−v2=2gx
1 1 1
解得长直木杆跟水平面第一次碰撞瞬间前的速度大小为:v ′=4√2m/s
1
1
长直木杆跟水平面第一次碰撞瞬间损失的机械能为:ΔE= m v'2
2 3 1
代入数据得:ΔE=1.6J
(4)长直木杆跟水平面第一次碰撞后,小橡胶环先沿长直木杆做匀速下滑,小橡胶环跟水平面
碰撞后小橡胶环沿长直木杆上滑时,小橡胶环做匀减速直线运动,长直木杆做匀加速直线运动,
第二次共速后又一起做竖直上抛,直到长直木杆跟水平面第二次碰撞,由运动学可列,
对橡胶环B:v =v ′﹣a t
2 1 12
v
对长杆:v =a t ,v'2−v2=2g× 2t
2 22 2 2 2 2√2 √2
联立可得长直木杆跟水平面第二次将要碰撞时的速度大小为:v ′=√2v = v '=( ) 2v
2 2 3 1 3
√2 √2
所以可得长直木杆跟水平面第n次将要碰撞时的速度大小表达式为:v ′=( ) nv=12×( ) n
n 3 3
小橡胶环沿长直木杆第一次下滑的路程为L,小橡胶环跟水平面碰撞后小橡胶环沿长直木杆,在
v+v v
长直木杆上第一次上滑的路程为:s = 1t − 1t
1 2 1 2 1
v2 122
代入数据得:s = = m=2.4m
1 6a 6×10
2
长直木杆跟水平面第一次碰撞后,小橡胶环先沿长直木杆在长直木杆上做匀速下滑的路程为
s ,小橡胶环跟水平面碰撞后小橡胶环沿长直木杆上滑时,在长直木杆上第二次上滑的路程为:
1
v '+v v
s = 1 2t − 2t
2 2 1 2 1
2
代入数据得:s = s
2 9 1
长直木杆跟水平面第一次碰撞后,小橡胶环先沿长直木杆在长直木杆上做匀速下滑的路程为
s ,以此类推小橡胶环在长直木杆上运动的总路程:s=L+2s +2s +2s +……
2 1 2 3
2s 2×2.4
+ 1 = + 321
代入数据得:s=L 2 3m 2 m= m
1− 1− 35
9 9
题型1圆周运动基本物理量的关系
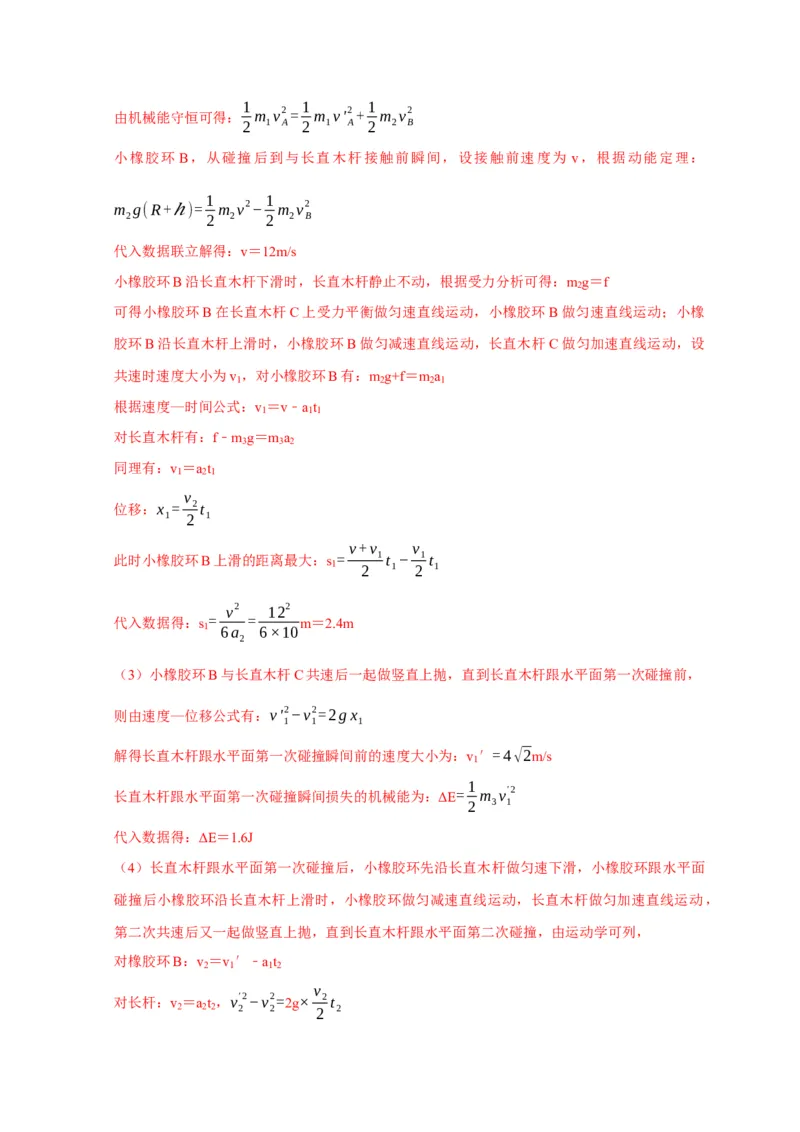
1. (2023•漳州模拟)如图为明代出版的《天工开物》中记录的“牛转翻车”,该设备
利用畜力转动不同半径齿轮来改变水车的转速,从而将水运送到高处。图中a、b分别为两个
齿轮边缘上的点,齿轮半径之比为r :r =4:3;a、c在同一齿轮上且a、c到转轴的距离之比
a b
为r :r =2:1,则在齿轮转动过程中( )
a cA.a、b的角速度相等
B.b的线速度比c的线速度小
C.b、c的周期之比为3:4
D.a、b的向心加速度大小之比为4:3
【解答】解:A、由图可知a、b为同缘传动时,边缘点的线速度大小相等,故v =v ,由于半径
a b
不同,根据公式v= r,可知a、b的角速度不相等,故A错误;
B、a与c同轴传动,ω角速度相等,即
a
=
c
,因a、c到转轴的距离之比为r
a
:r
c
=2:1,由公
式v= r,可得:v =2v ,又v =v ,ω则v ω=2v ,故B错误;
a c a b b c
ω
2π T ω ω r 3
C、由公式T= ,可得b、c的周期之比为: b= c = a= b= ,故C正确;
ω T ω ω r 4
c b b a
v2 a r 3
D、由公式a= ,可得a、b的向心加速度之比为: a= b= ,故D错误。
r a r 4
b a
故选:C。
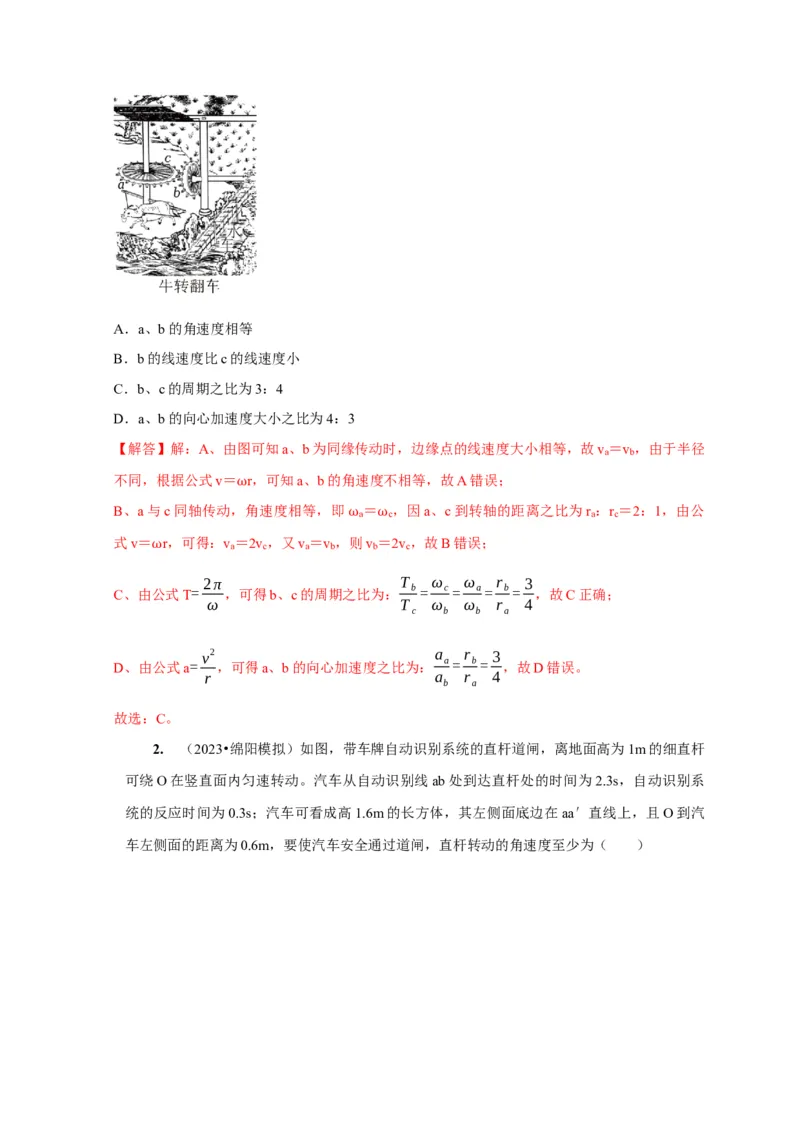
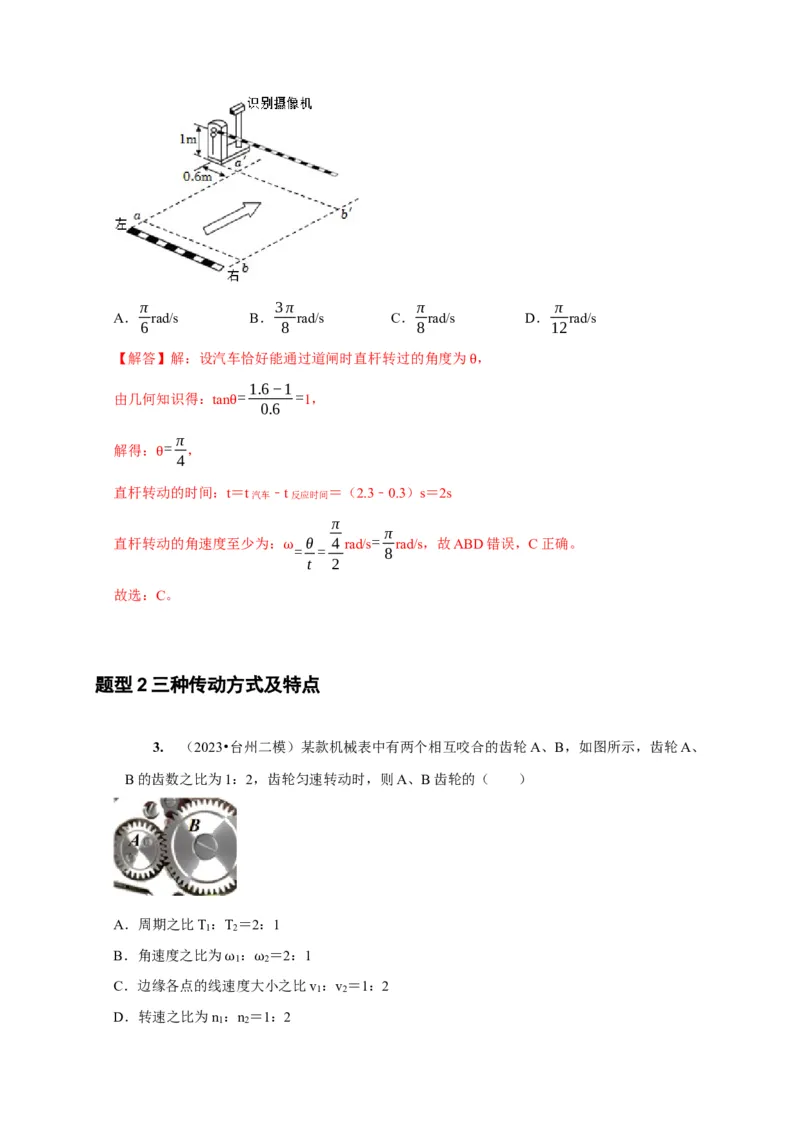
2. (2023•绵阳模拟)如图,带车牌自动识别系统的直杆道闸,离地面高为1m的细直杆
可绕O在竖直面内匀速转动。汽车从自动识别线ab处到达直杆处的时间为2.3s,自动识别系
统的反应时间为0.3s;汽车可看成高1.6m的长方体,其左侧面底边在aa′直线上,且O到汽
车左侧面的距离为0.6m,要使汽车安全通过道闸,直杆转动的角速度至少为( )π 3π π π
A. rad/s B. rad/s C. rad/s D. rad/s
6 8 8 12
【解答】解:设汽车恰好能通过道闸时直杆转过的角度为 ,
1.6−1 θ
由几何知识得:tan = =1,
0.6
θ
π
解得: = ,
4
θ
直杆转动的时间:t=t汽车 ﹣t反应时间 =(2.3﹣0.3)s=2s
π
π
直杆转动的角速度至少为: θ 4 rad/s= rad/s,故ABD错误,C正确。
= = 8
t 2
ω
故选:C。
题型2三种传动方式及特点
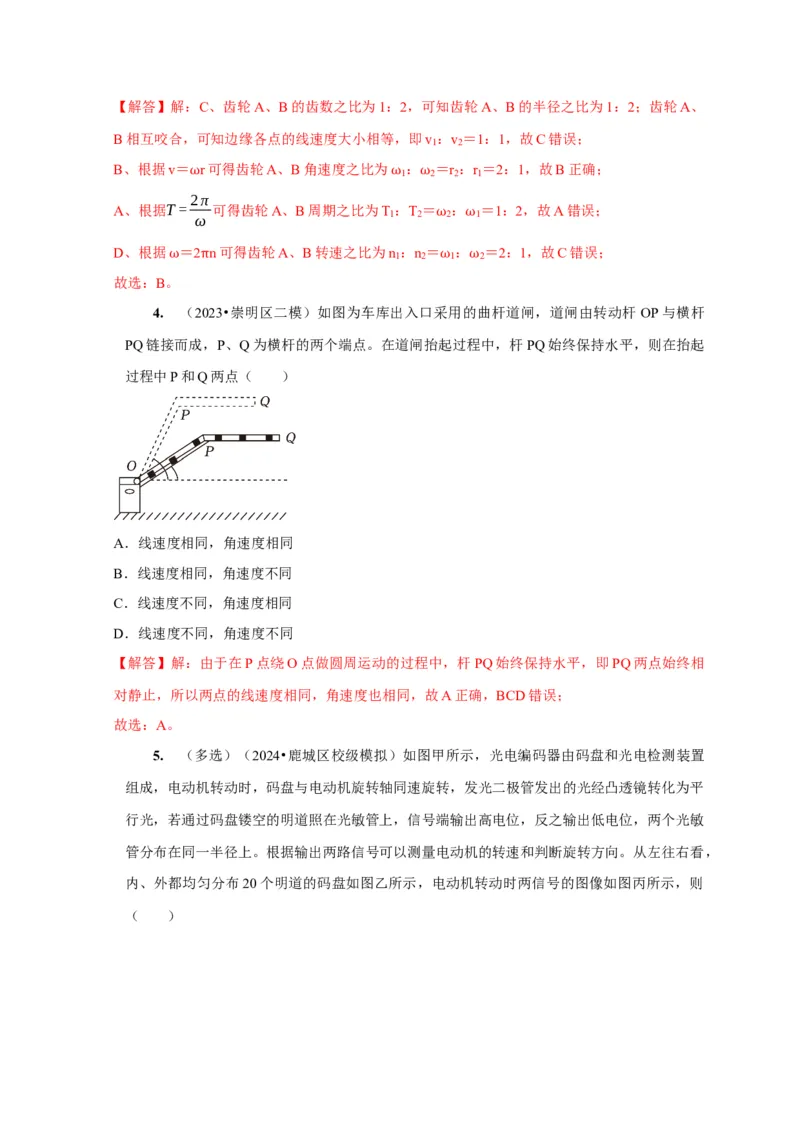
3. (2023•台州二模)某款机械表中有两个相互咬合的齿轮A、B,如图所示,齿轮A、
B的齿数之比为1:2,齿轮匀速转动时,则A、B齿轮的( )
A.周期之比T :T =2:1
1 2
B.角速度之比为 : =2:1
1 2
C.边缘各点的线速ω度大ω小之比v :v =1:2
1 2
D.转速之比为n :n =1:2
1 2【解答】解:C、齿轮A、B的齿数之比为1:2,可知齿轮A、B的半径之比为1:2;齿轮A、
B相互咬合,可知边缘各点的线速度大小相等,即v :v =1:1,故C错误;
1 2
B、根据v= r可得齿轮A、B角速度之比为 : =r :r =2:1,故B正确;
1 2 2 1
ω2π ω ω
A、根据T= 可得齿轮A、B周期之比为T :T = : =1:2,故A错误;
ω 1 2 2 1
ω ω
D、根据 =2 n可得齿轮A、B转速之比为n :n = : =2:1,故C错误;
1 2 1 2
故选:B。ω π ω ω
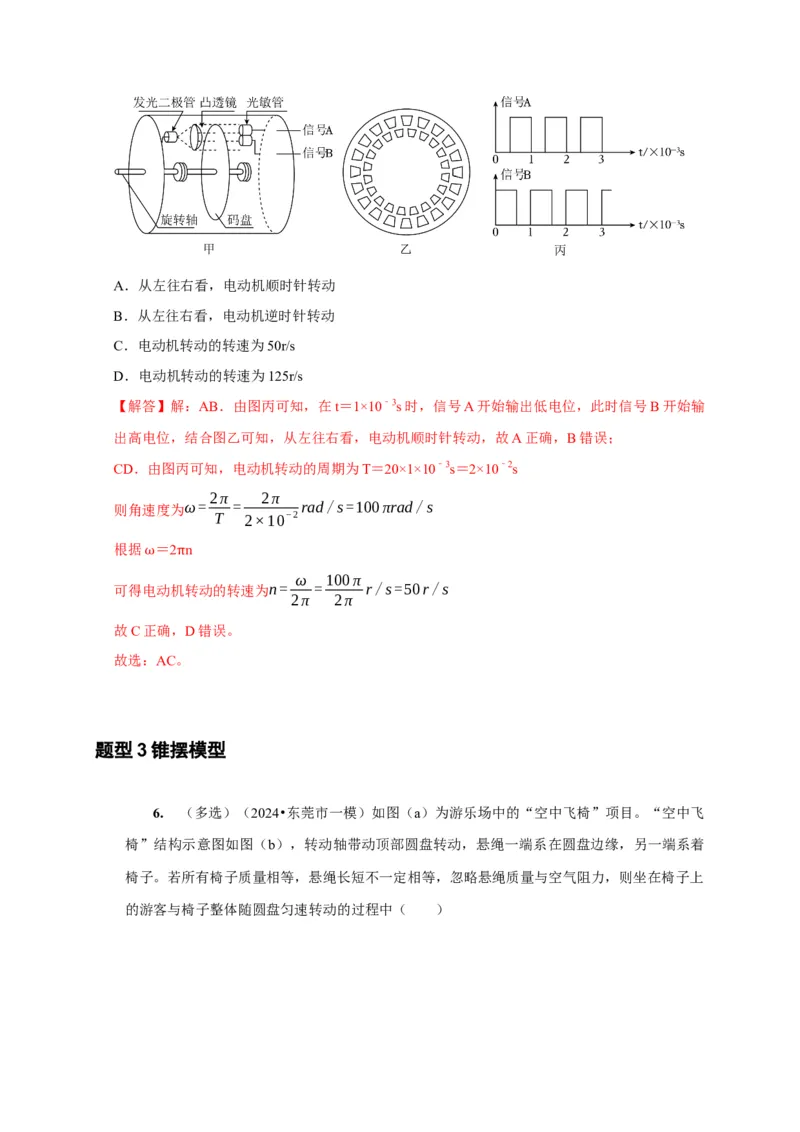
4. (2023•崇明区二模)如图为车库出入口采用的曲杆道闸,道闸由转动杆 OP与横杆
PQ链接而成,P、Q为横杆的两个端点。在道闸抬起过程中,杆PQ始终保持水平,则在抬起
过程中P和Q两点( )
A.线速度相同,角速度相同
B.线速度相同,角速度不同
C.线速度不同,角速度相同
D.线速度不同,角速度不同
【解答】解:由于在P点绕O点做圆周运动的过程中,杆PQ始终保持水平,即PQ两点始终相
对静止,所以两点的线速度相同,角速度也相同,故A正确,BCD错误;
故选:A。
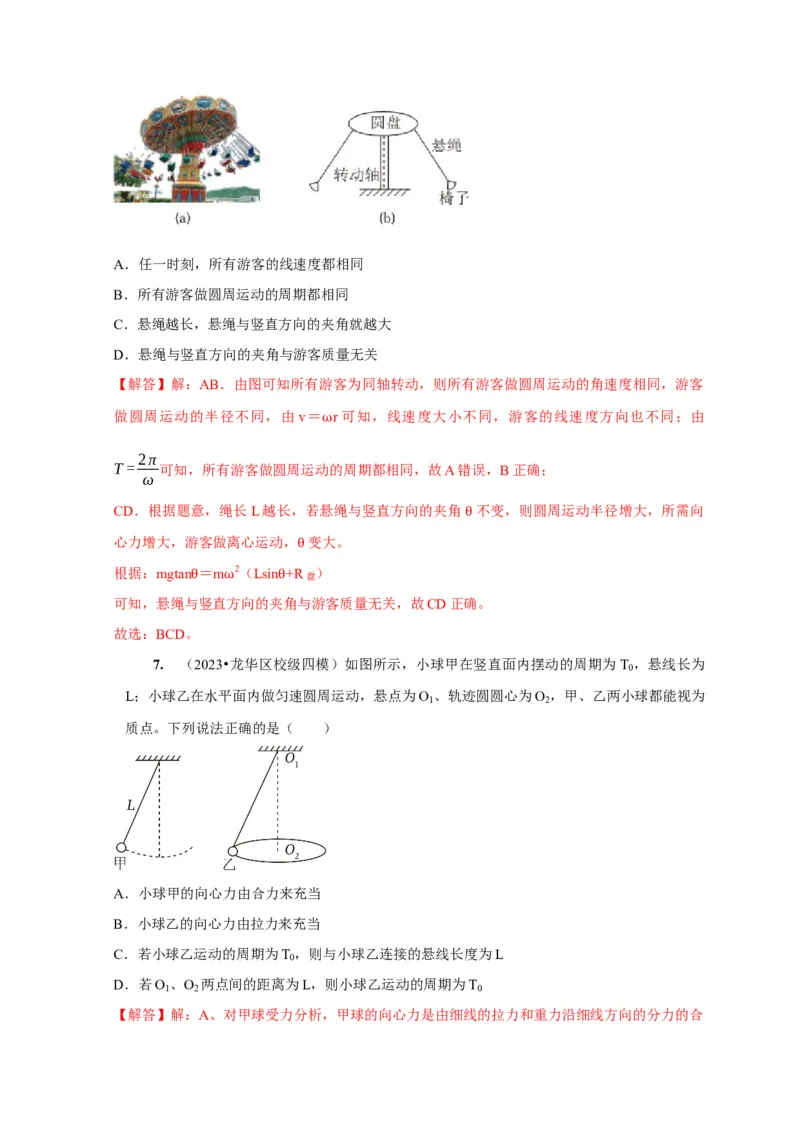
5. (多选)(2024•鹿城区校级模拟)如图甲所示,光电编码器由码盘和光电检测装置
组成,电动机转动时,码盘与电动机旋转轴同速旋转,发光二极管发出的光经凸透镜转化为平
行光,若通过码盘镂空的明道照在光敏管上,信号端输出高电位,反之输出低电位,两个光敏
管分布在同一半径上。根据输出两路信号可以测量电动机的转速和判断旋转方向。从左往右看,
内、外都均匀分布20个明道的码盘如图乙所示,电动机转动时两信号的图像如图丙所示,则
( )A.从左往右看,电动机顺时针转动
B.从左往右看,电动机逆时针转动
C.电动机转动的转速为50r/s
D.电动机转动的转速为125r/s
【解答】解:AB.由图丙可知,在t=1×10﹣3s时,信号A开始输出低电位,此时信号B开始输
出高电位,结合图乙可知,从左往右看,电动机顺时针转动,故A正确,B错误;
CD.由图丙可知,电动机转动的周期为T=20×1×10﹣3s=2×10﹣2s
2π 2π
则角速度为ω= = rad/s=100πrad/s
T 2×10−2
根据 =2 n
ω π ω 100π
可得电动机转动的转速为n= = r/s=50r/s
2π 2π
故C正确,D错误。
故选:AC。
题型3锥摆模型
6. (多选)(2024•东莞市一模)如图(a)为游乐场中的“空中飞椅”项目。“空中飞
椅”结构示意图如图(b),转动轴带动顶部圆盘转动,悬绳一端系在圆盘边缘,另一端系着
椅子。若所有椅子质量相等,悬绳长短不一定相等,忽略悬绳质量与空气阻力,则坐在椅子上
的游客与椅子整体随圆盘匀速转动的过程中( )A.任一时刻,所有游客的线速度都相同
B.所有游客做圆周运动的周期都相同
C.悬绳越长,悬绳与竖直方向的夹角就越大
D.悬绳与竖直方向的夹角与游客质量无关
【解答】解:AB.由图可知所有游客为同轴转动,则所有游客做圆周运动的角速度相同,游客
做圆周运动的半径不同,由 v= r可知,线速度大小不同,游客的线速度方向也不同;由
ω
2π
T= 可知,所有游客做圆周运动的周期都相同,故A错误,B正确;
ω
CD.根据题意,绳长L越长,若悬绳与竖直方向的夹角 不变,则圆周运动半径增大,所需向
心力增大,游客做离心运动, 变大。 θ
根据:mgtan =m 2(Lsin +Rθ盘 )
可知,悬绳与θ竖直ω方向的夹θ角与游客质量无关,故CD正确。
故选:BCD。
7. (2023•龙华区校级四模)如图所示,小球甲在竖直面内摆动的周期为T ,悬线长为
0
L;小球乙在水平面内做匀速圆周运动,悬点为O 、轨迹圆圆心为O ,甲、乙两小球都能视为
1 2
质点。下列说法正确的是( )
A.小球甲的向心力由合力来充当
B.小球乙的向心力由拉力来充当
C.若小球乙运动的周期为T ,则与小球乙连接的悬线长度为L
0
D.若O 、O 两点间的距离为L,则小球乙运动的周期为T
1 2 0
【解答】解:A、对甲球受力分析,甲球的向心力是由细线的拉力和重力沿细线方向的分力的合力提供,故A错误;
B、小球乙在水平面内做匀速圆周运动,乙球的向心力是拉力沿水平方向的分力提供,故B错误;
CD、对乙球进行受力分析,设悬线与竖直方向的夹角为 ,O 、O 两点间的距离为h,轨迹圆
1 2
半径为r, α
根据牛顿第二定律得
4π2
mgtanα=m r,
T2
又由几何关系得tanα=
r
,解得T=2π
√ℎ
ℎ g
√L
对比甲球的摆动周期T =2π 可知,当T=T 时,解得h=L,则知小球乙连接的悬线长度为
0 g 0
大于L,O 、O 两点间的距离为L,故C错误,D正确。
1 2
故选:D。
8. (2023•江苏一模)如图所示,一轻支架由水平段ON和竖直段OO'组成。轻弹簧一端
固定于O点,另一端与套在水平杆ON上的A球相连,一根长为L=10cm的轻绳连接A、B两
球。A球质量m =1kg,B球质量m =4kg,A球与水平杆的动摩擦因数 =0.36,弹簧原长l
A B
=20cm,劲度系数k=450N/m。初始时使A球尽量压缩弹簧并恰好处于静μ止状态。现使系统
绕OO'轴缓慢转动起来,转动过程中保持A、B两球始终与OO'在同一竖直平面内。当系统以
某角速度稳定转动时,细绳与竖直方向成37°角,此时弹簧的弹力大小恰好与初始时相同。设
最大静摩擦力等于滑动摩擦力,不计空气阻力。sin37°=0.6,cos37°=0.8,g=10m/s2,求:
(1)初始时弹簧的长度;
(2)细绳与竖直方向成37°角时,系统转动的角速度;
(3)整个过程中驱动力对系统所做的总功。
【解答】解:已知l=20cm=0.2m,L=10cm=0.1m
(1)初始时,弹簧处于压缩状态,A球恰好处于静止状态,设初始时弹簧的压缩量为 Δl,由平衡条件有
kΔl= (m +m )g
A B
解得:Δμl=0.04m
则初始时弹簧的长度为l =l﹣Δl=0.2m﹣0.04m=0.16m
0
(2)当系统以某角速度稳定转动,弹簧的弹力大小与初始时相同时,弹簧处于拉伸状态,且伸
长量与初始状态的压缩量相等。
对B球,由牛顿第二定律有
m gtan37°=m 2r
B B B
其中r =l+Δl+Lsωin37°=0.2m+0.04m+0.1×0.6m=0.3m
B
解得: =5rad/s
(3)根ω据能量守恒知,整个过程中驱动力对系统所做的功等于 A、B球的动能增加、B球的重
力势能增加、A球与水平横杆间摩擦产生的内能之和,则有
1 1
W= m [(l+Δl)ω] 2+ m (ωr ) 2+m gL(1﹣cos37°)+ (m +m )g•2Δl
2 A 2 B B B A B
μ
解得:W=7.46J
题型4转弯模型
9. (2023•昆明一模)图甲是市区中心的环岛路,A、B两车正在绕环岛做速度大小相等
的匀速圆周运动,如图乙所示。下列说法正确的是( )
A.A、B两车的向心加速度大小相等
B.A车的角速度比B车的角速度大
C.A、B两车所受的合力大小一定相等
D.A车所受的合力大小一定比B车的大
v2
【解答】解:ACD、两车的线速度v大小相等,由图可知r >r ,由a = 可得A车的向心加
B A n r
速度大于B车向心加速度,匀速圆周运动合力全部提供向心力,两车的质量关系未知,由 F=ma 可知,两车的向心力即合力大小无法确定,故ACD错误;
n
v
B、由ω= 可知,A车的角速度大于B车角速度,故B正确。
r
故选:B。
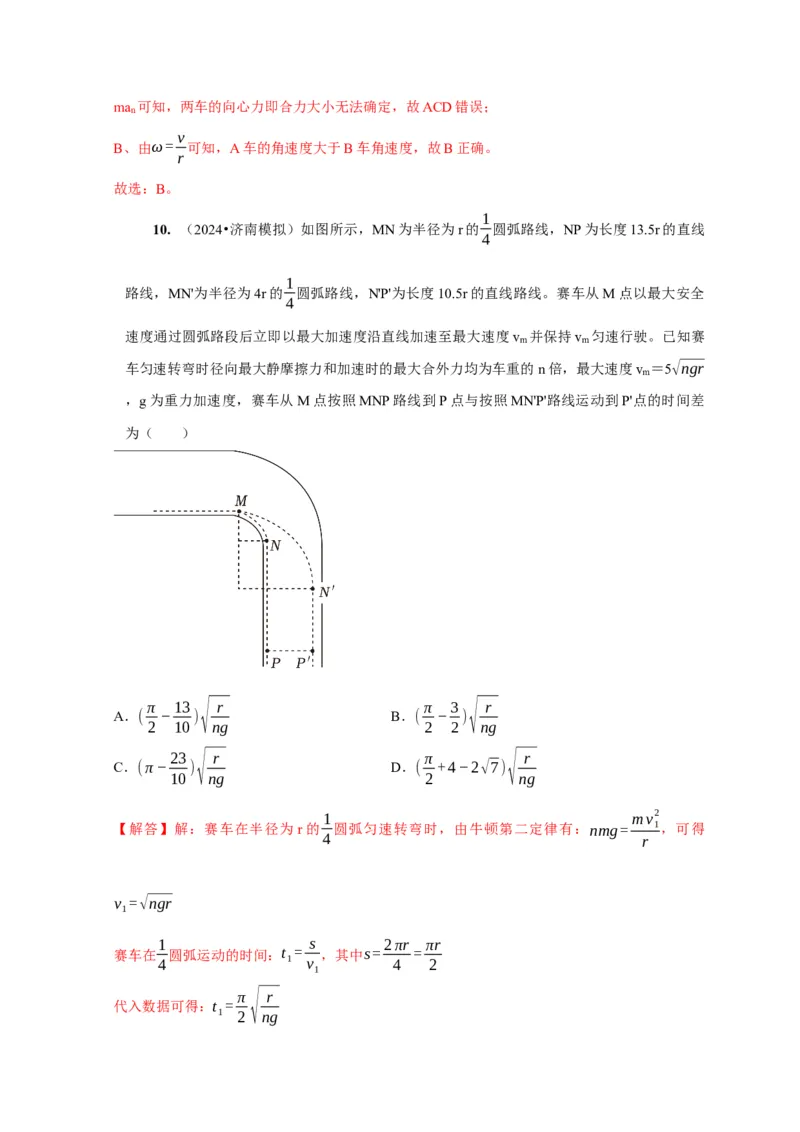
1
10. (2024•济南模拟)如图所示,MN为半径为r的 圆弧路线,NP为长度13.5r的直线
4
1
路线,MN'为半径为4r的 圆弧路线,N'P'为长度10.5r的直线路线。赛车从M点以最大安全
4
速度通过圆弧路段后立即以最大加速度沿直线加速至最大速度v 并保持v 匀速行驶。已知赛
m m
车匀速转弯时径向最大静摩擦力和加速时的最大合外力均为车重的n倍,最大速度v =5√ngr
m
,g为重力加速度,赛车从M点按照MNP路线到P点与按照MN'P'路线运动到P'点的时间差
为( )
π 13 √ r π 3 √ r
A.( − ) B.( − )
2 10 ng 2 2 ng
23 √ r π √ r
C.(π− ) D.( +4−2√7)
10 ng 2 ng
1 mv2
【解答】解:赛车在半径为r的 圆弧匀速转弯时,由牛顿第二定律有:nmg= 1,可得
4 r
v =√ngr
1
1 s 2πr πr
赛车在 圆弧运动的时间:t = ,其中s= =
4 1 v 4 2
1
π √ r
代入数据可得:t =
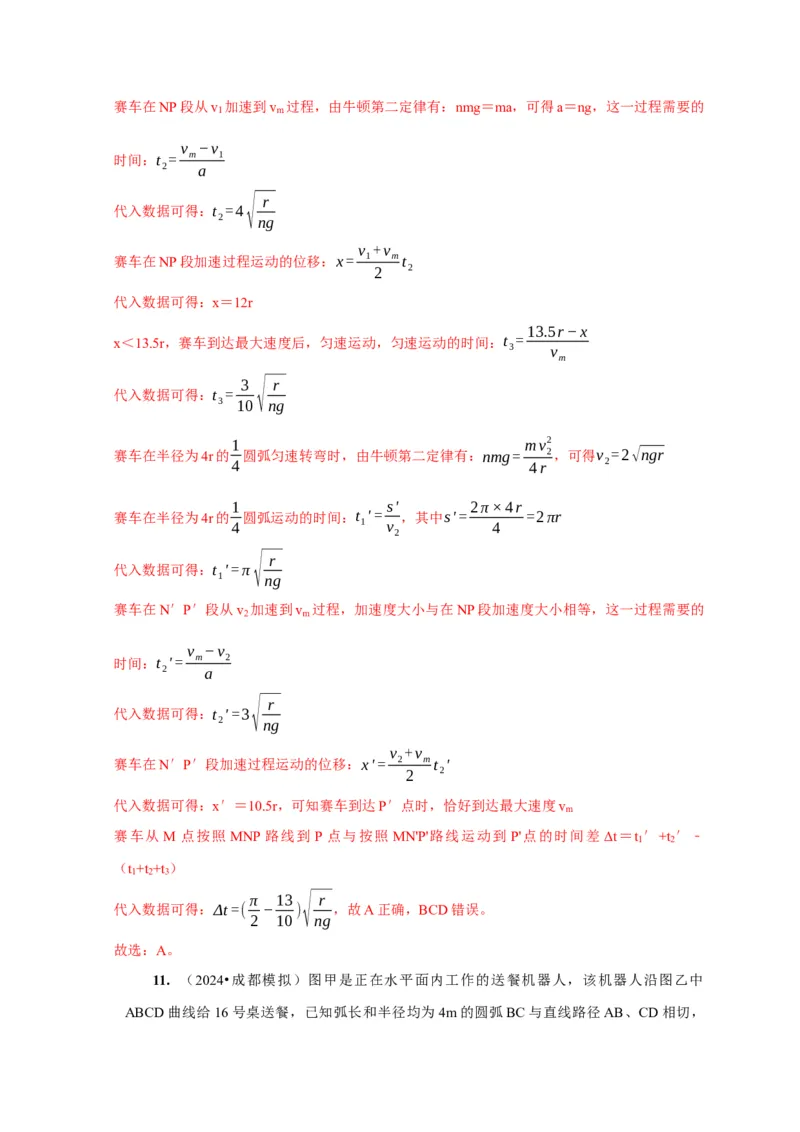
1 2 ng赛车在NP段从v 加速到v 过程,由牛顿第二定律有:nmg=ma,可得a=ng,这一过程需要的
1 m
v −v
时间:t = m 1
2 a
√ r
代入数据可得:t =4
2 ng
v +v
赛车在NP段加速过程运动的位移:x= 1 mt
2 2
代入数据可得:x=12r
13.5r−x
x<13.5r,赛车到达最大速度后,匀速运动,匀速运动的时间:t =
3 v
m
3 √ r
代入数据可得:t =
3 10 ng
1 mv2
赛车在半径为4r的 圆弧匀速转弯时,由牛顿第二定律有:nmg= 2,可得v =2√ngr
4 4r 2
1 s' 2π×4r
赛车在半径为4r的 圆弧运动的时间:t '= ,其中s'= =2πr
4 1 v 4
2
√ r
代入数据可得:t '=π
1 ng
赛车在N′P′段从v 加速到v 过程,加速度大小与在NP段加速度大小相等,这一过程需要的
2 m
v −v
时间:t '= m 2
2 a
√ r
代入数据可得:t '=3
2 ng
v +v
赛车在N′P′段加速过程运动的位移:x'= 2 mt '
2 2
代入数据可得:x′=10.5r,可知赛车到达P′点时,恰好到达最大速度v
m
赛车从 M 点按照 MNP 路线到 P 点与按照 MN'P'路线运动到 P'点的时间差 Δt=t ′+t ′﹣
1 2
(t +t +t )
1 2 3
π 13 √ r
代入数据可得:Δt=( − ) ,故A正确,BCD错误。
2 10 ng
故选:A。
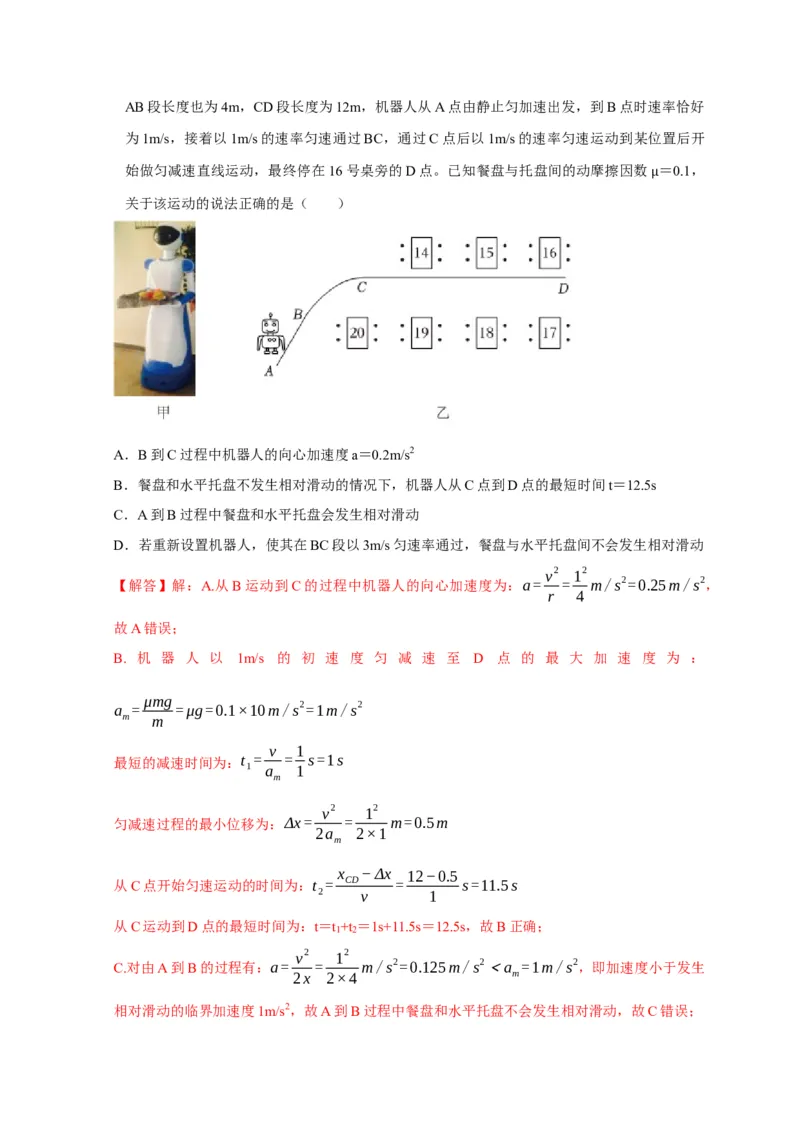
11. (2024•成都模拟)图甲是正在水平面内工作的送餐机器人,该机器人沿图乙中
ABCD曲线给16号桌送餐,已知弧长和半径均为4m的圆弧BC与直线路径AB、CD相切,AB段长度也为4m,CD段长度为12m,机器人从A点由静止匀加速出发,到B点时速率恰好
为1m/s,接着以1m/s的速率匀速通过BC,通过C点后以1m/s的速率匀速运动到某位置后开
始做匀减速直线运动,最终停在16号桌旁的D点。已知餐盘与托盘间的动摩擦因数 =0.1,
关于该运动的说法正确的是( ) μ
A.B到C过程中机器人的向心加速度a=0.2m/s2
B.餐盘和水平托盘不发生相对滑动的情况下,机器人从C点到D点的最短时间t=12.5s
C.A到B过程中餐盘和水平托盘会发生相对滑动
D.若重新设置机器人,使其在BC段以3m/s匀速率通过,餐盘与水平托盘间不会发生相对滑动
v2 12
【解答】解:A.从B运动到C的过程中机器人的向心加速度为:a= = m/s2=0.25m/s2,
r 4
故A错误;
B. 机 器 人 以 1m/s 的 初 速 度 匀 减 速 至 D 点 的 最 大 加 速 度 为 :
μmg
a = =μg=0.1×10m/s2=1m/s2
m m
v 1
最短的减速时间为:t = = s=1s
1 a 1
m
v2 12
匀减速过程的最小位移为:Δx= = m=0.5m
2a 2×1
m
x −Δx 12−0.5
从C点开始匀速运动的时间为:t = CD = s=11.5s
2 v 1
从C运动到D点的最短时间为:t=t +t =1s+11.5s=12.5s,故B正确;
1 2
v2 12
C.对由A到B的过程有:a= = m/s2=0.125m/s2<a =1m/s2,即加速度小于发生
2x 2×4 m
相对滑动的临界加速度1m/s2,故A到B过程中餐盘和水平托盘不会发生相对滑动,故C错误;D.在BC段餐盘与托盘恰好不发生相对滑动时,由最大静摩擦力提供向心力,则有:
v2
μmg=m m,解得:v =2m/s<3m/s,则餐盘与水平托盘间会发生相对滑动,故D错误。
m
R
故选:B。
题型5圆盘模型
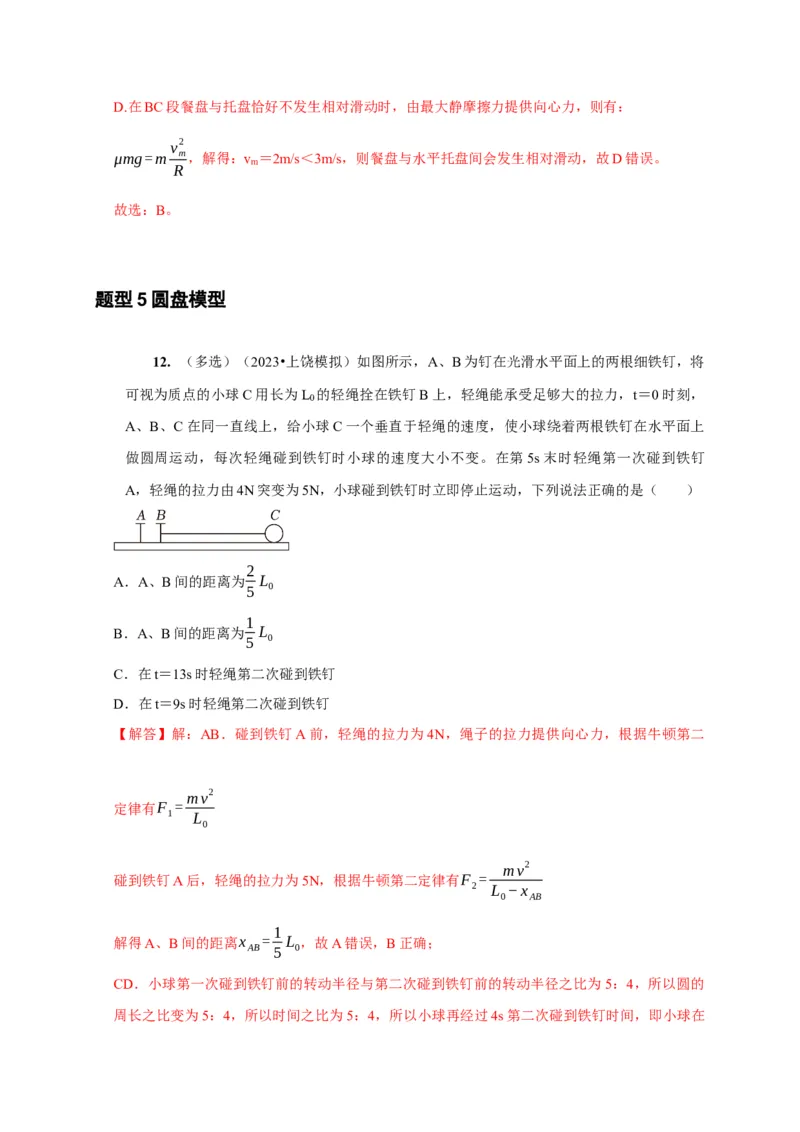
12. (多选)(2023•上饶模拟)如图所示,A、B为钉在光滑水平面上的两根细铁钉,将
可视为质点的小球C用长为L 的轻绳拴在铁钉B上,轻绳能承受足够大的拉力,t=0时刻,
0
A、B、C在同一直线上,给小球C一个垂直于轻绳的速度,使小球绕着两根铁钉在水平面上
做圆周运动,每次轻绳碰到铁钉时小球的速度大小不变。在第5s末时轻绳第一次碰到铁钉
A,轻绳的拉力由4N突变为5N,小球碰到铁钉时立即停止运动,下列说法正确的是( )
2
A.A、B间的距离为 L
5 0
1
B.A、B间的距离为 L
5 0
C.在t=13s时轻绳第二次碰到铁钉
D.在t=9s时轻绳第二次碰到铁钉
【解答】解:AB.碰到铁钉A前,轻绳的拉力为4N,绳子的拉力提供向心力,根据牛顿第二
mv2
定律有F =
1 L
0
mv2
碰到铁钉A后,轻绳的拉力为5N,根据牛顿第二定律有F =
2 L −x
0 AB
1
解得A、B间的距离x = L ,故A错误,B正确;
AB 5 0
CD.小球第一次碰到铁钉前的转动半径与第二次碰到铁钉前的转动半径之比为 5:4,所以圆的
周长之比变为5:4,所以时间之比为5:4,所以小球再经过4s第二次碰到铁钉时间,即小球在t=9s时轻绳第二次碰到铁钉,故C错误,D正确。
故选:BD。
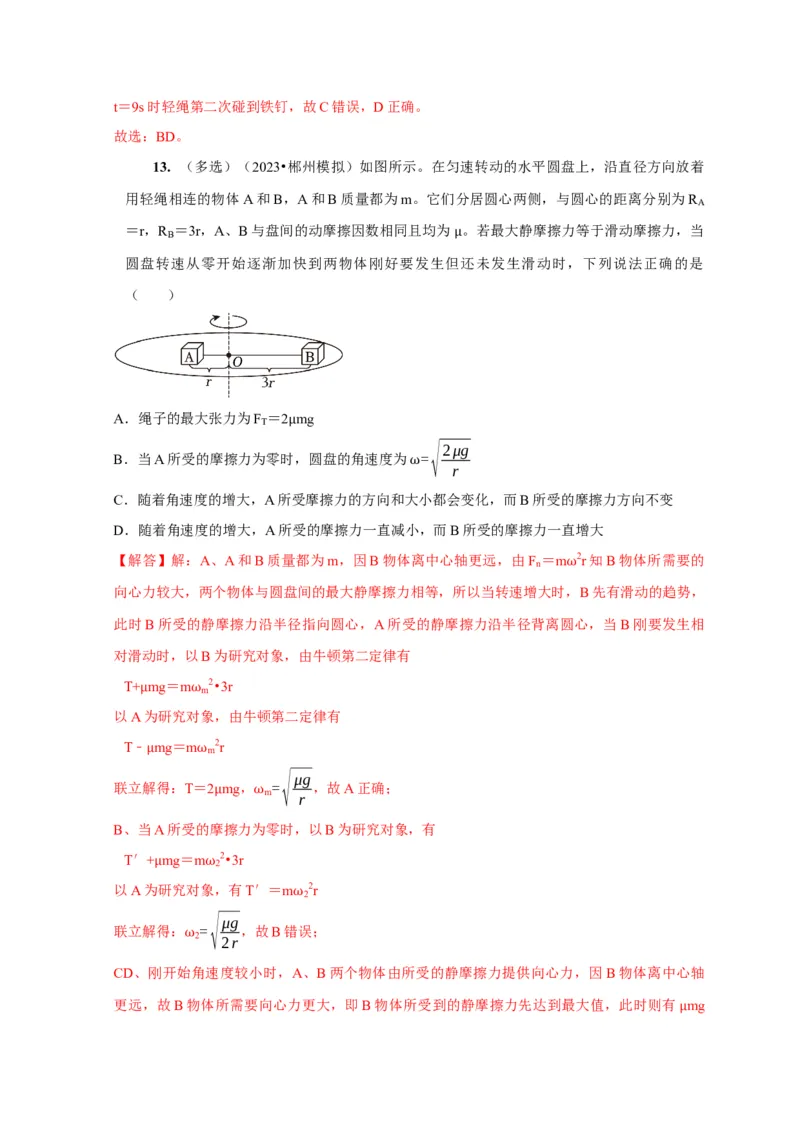
13. (多选)(2023•郴州模拟)如图所示。在匀速转动的水平圆盘上,沿直径方向放着
用轻绳相连的物体A和B,A和B质量都为m。它们分居圆心两侧,与圆心的距离分别为R
A
=r,R =3r,A、B与盘间的动摩擦因数相同且均为 。若最大静摩擦力等于滑动摩擦力,当
B
圆盘转速从零开始逐渐加快到两物体刚好要发生但μ还未发生滑动时,下列说法正确的是
( )
A.绳子的最大张力为F =2 mg
T
μ √2μg
B.当A所受的摩擦力为零时,圆盘的角速度为 =
r
ω
C.随着角速度的增大,A所受摩擦力的方向和大小都会变化,而B所受的摩擦力方向不变
D.随着角速度的增大,A所受的摩擦力一直减小,而B所受的摩擦力一直增大
【解答】解:A、A和B质量都为m,因B物体离中心轴更远,由F =m 2r知B物体所需要的
n
向心力较大,两个物体与圆盘间的最大静摩擦力相等,所以当转速增大时,ωB先有滑动的趋势,
此时B所受的静摩擦力沿半径指向圆心,A所受的静摩擦力沿半径背离圆心,当B刚要发生相
对滑动时,以B为研究对象,由牛顿第二定律有
T+ mg=m 2•3r
m
以Aμ为研究对ω象,由牛顿第二定律有
T﹣ mg=m 2r
m
μ ω √μg
联立解得:T=2 mg, = ,故A正确;
m
r
μ ω
B、当A所受的摩擦力为零时,以B为研究对象,有
T′+ mg=m 2•3r
2
以A为μ研究对象ω,有T′=m 2r
2
√μg ω
联立解得: = ,故B错误;
2
2r
ω
CD、刚开始角速度较小时,A、B两个物体由所受的静摩擦力提供向心力,因B物体离中心轴
更远,故B物体所需要向心力更大,即B物体所受到的静摩擦力先达到最大值,此时则有 mg
μ√μg √μg
=m 2•3r,解得 = ,故当0< ≤ 时,A、B两物体所受的静摩擦力都增大,此时
1 1
3r 3r
ω ω ω
A、B所受摩擦力方向都指向圆心;
√μg √μg
当 < ≤ 时,A物体所受静摩擦力的大小减小,方向指向圆心,B物体所受静摩擦力
3r 2r
ω
√μg √μg
达到最大,大小不变,方向指向圆心;当 < ≤ 时,A物体所受的静摩擦的大小增大,
2r r
ω
方向背离圆心,B物体所受静摩擦力达到最大,大小不变,方向指向圆心,故C正确,D错误。
故选:AC。
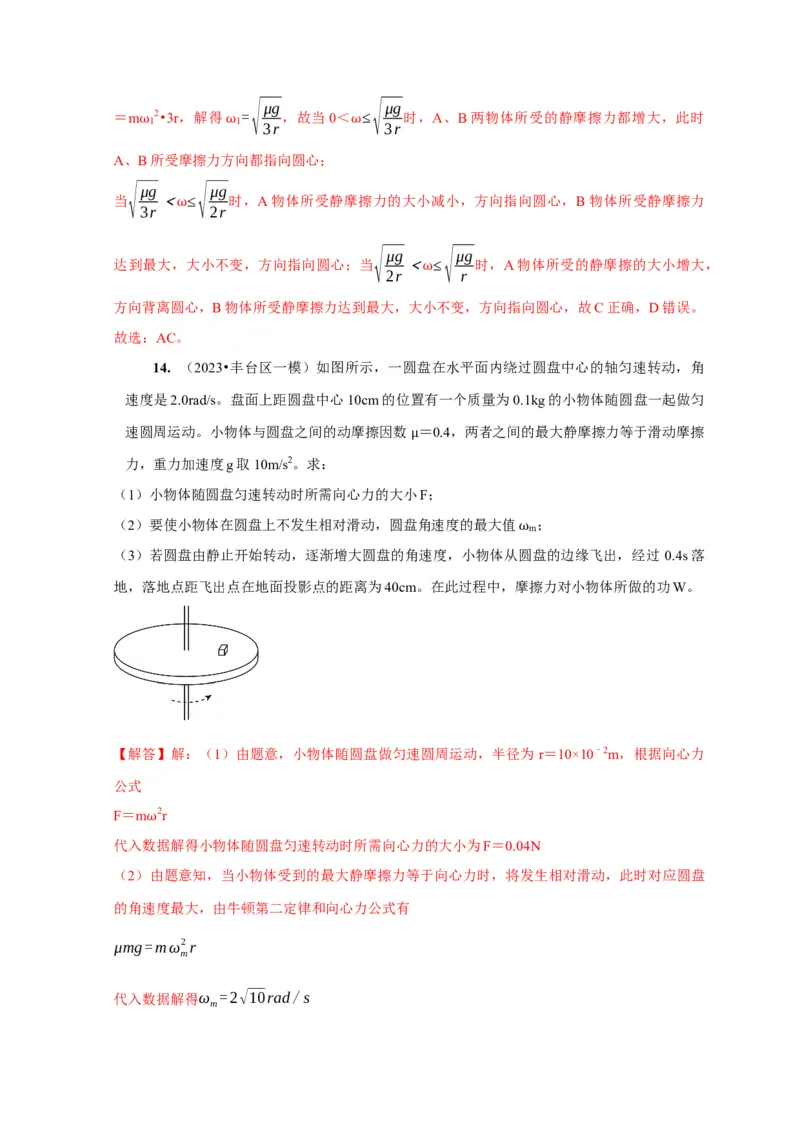
14. (2023•丰台区一模)如图所示,一圆盘在水平面内绕过圆盘中心的轴匀速转动,角
速度是2.0rad/s。盘面上距圆盘中心10cm的位置有一个质量为0.1kg的小物体随圆盘一起做匀
速圆周运动。小物体与圆盘之间的动摩擦因数 =0.4,两者之间的最大静摩擦力等于滑动摩擦
力,重力加速度g取10m/s2。求: μ
(1)小物体随圆盘匀速转动时所需向心力的大小F;
(2)要使小物体在圆盘上不发生相对滑动,圆盘角速度的最大值 ;
m
(3)若圆盘由静止开始转动,逐渐增大圆盘的角速度,小物体从圆ω盘的边缘飞出,经过 0.4s落
地,落地点距飞出点在地面投影点的距离为40cm。在此过程中,摩擦力对小物体所做的功W。
【解答】解:(1)由题意,小物体随圆盘做匀速圆周运动,半径为 r=10×10﹣2m,根据向心力
公式
F=m 2r
代入数ω据解得小物体随圆盘匀速转动时所需向心力的大小为F=0.04N
(2)由题意知,当小物体受到的最大静摩擦力等于向心力时,将发生相对滑动,此时对应圆盘
的角速度最大,由牛顿第二定律和向心力公式有
μmg=mω2 r
m
代入数据解得ω =2√10rad/s
m(3)小物体飞出后做平抛运动,其水平位移 x=40×10﹣2m,设其运动时间为t,由平抛运动规
x
律有v=
t
代入数据解得v=1m/s
小物体由静止到飞出的过程中,由动能定理有
1
W = mv2−0
2
代入数据解得W=0.05J
题型6离心现象的应用与防止
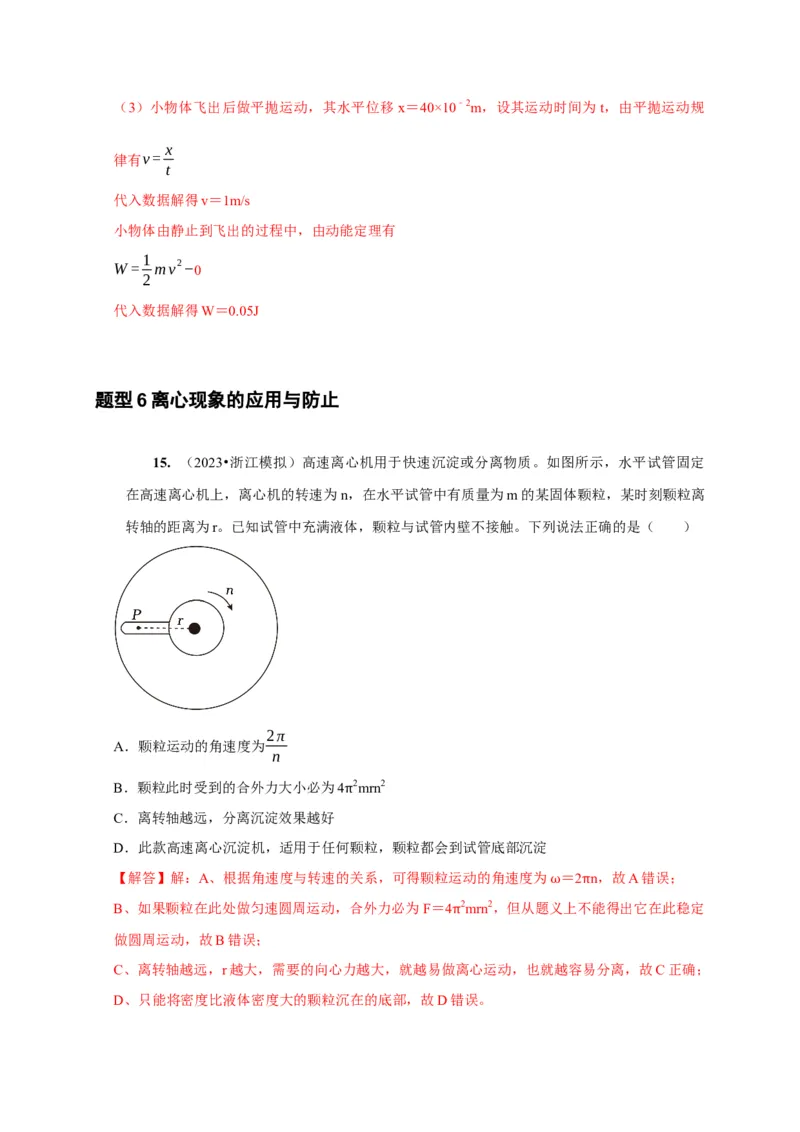
15. (2023•浙江模拟)高速离心机用于快速沉淀或分离物质。如图所示,水平试管固定
在高速离心机上,离心机的转速为n,在水平试管中有质量为m的某固体颗粒,某时刻颗粒离
转轴的距离为r。已知试管中充满液体,颗粒与试管内壁不接触。下列说法正确的是( )
2π
A.颗粒运动的角速度为
n
B.颗粒此时受到的合外力大小必为4 2mrn2
C.离转轴越远,分离沉淀效果越好 π
D.此款高速离心沉淀机,适用于任何颗粒,颗粒都会到试管底部沉淀
【解答】解:A、根据角速度与转速的关系,可得颗粒运动的角速度为 =2 n,故A错误;
B、如果颗粒在此处做匀速圆周运动,合外力必为F=4 2mrn2,但从题义ω上不π能得出它在此稳定
做圆周运动,故B错误; π
C、离转轴越远,r越大,需要的向心力越大,就越易做离心运动,也就越容易分离,故C正确;
D、只能将密度比液体密度大的颗粒沉在的底部,故D错误。故选:C。
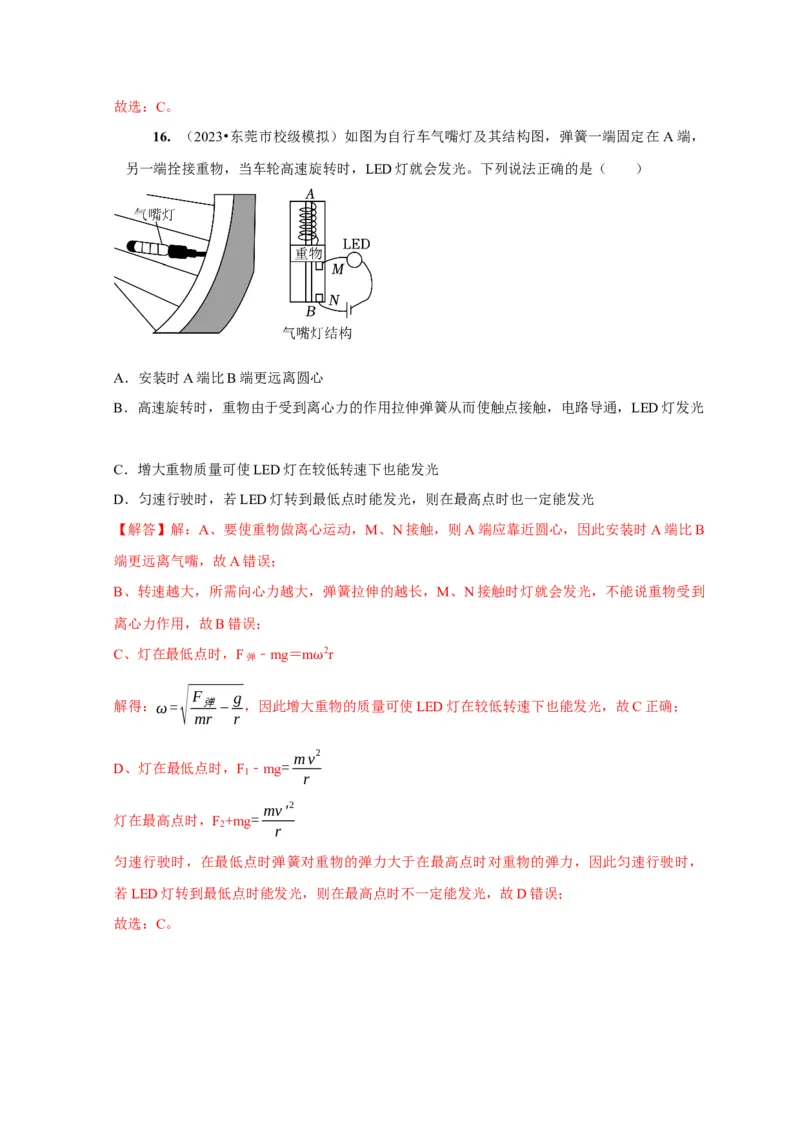
16. (2023•东莞市校级模拟)如图为自行车气嘴灯及其结构图,弹簧一端固定在 A端,
另一端拴接重物,当车轮高速旋转时,LED灯就会发光。下列说法正确的是( )
A.安装时A端比B端更远离圆心
B.高速旋转时,重物由于受到离心力的作用拉伸弹簧从而使触点接触,电路导通,LED灯发光
C.增大重物质量可使LED灯在较低转速下也能发光
D.匀速行驶时,若LED灯转到最低点时能发光,则在最高点时也一定能发光
【解答】解:A、要使重物做离心运动,M、N接触,则A端应靠近圆心,因此安装时A端比B
端更远离气嘴,故A错误;
B、转速越大,所需向心力越大,弹簧拉伸的越长,M、N接触时灯就会发光,不能说重物受到
离心力作用,故B错误;
C、灯在最低点时,F弹 ﹣mg=m 2r
ω
√F g
解得:ω= 弹− ,因此增大重物的质量可使LED灯在较低转速下也能发光,故C正确;
mr r
mv2
D、灯在最低点时,F ﹣mg=
1
r
mv'2
灯在最高点时,F +mg=
2
r
匀速行驶时,在最低点时弹簧对重物的弹力大于在最高点时对重物的弹力,因此匀速行驶时,
若LED灯转到最低点时能发光,则在最高点时不一定能发光,故D错误;
故选:C。
