 夜雨聆风
夜雨聆风





FANUC机器人工具坐标系、工件(用户)坐标系、输入输出、用户报警、寄存器数据容量扩展实操

工具坐标系个数默认10个,最大253个

工件(用户)坐标系个数默认9个,最大 253个

数字输入/输出个数默认512个,最大8192个


GI/GO(组I/O):默认 64/64;最大 256/256(软件)


UI/UO(外部I/O):固定 18/20(不可扩展,可优化分配)


用户报警个数默认10个, 最大:999个。

数值寄存器R个数默认200个,最大 999(免费);5000(付费功能)

位置寄存器PR个数默认100个,最大 372(免费);2000(付费功能)

…………
有些时候在机器人默认状态下,各个用户数据的个数不一定能满足我们的项目调试需求,当我们需要增加它们的个数时,就需要进行个数的扩展。
1、通过设置页面进行扩展
辅助菜单键“FCTN”——重新启动,按下示教器键盘“ENTER”键。
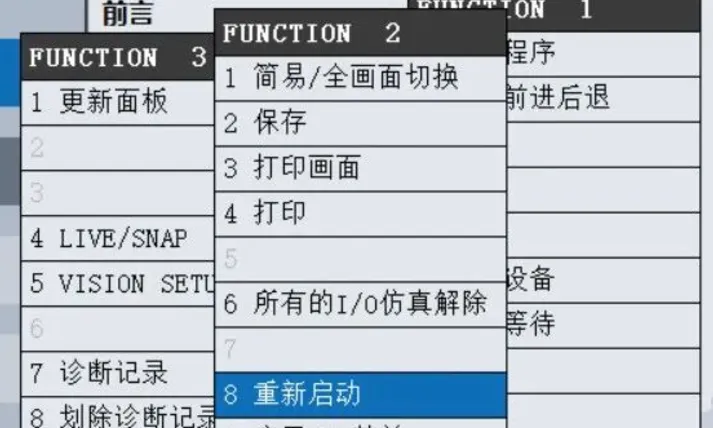
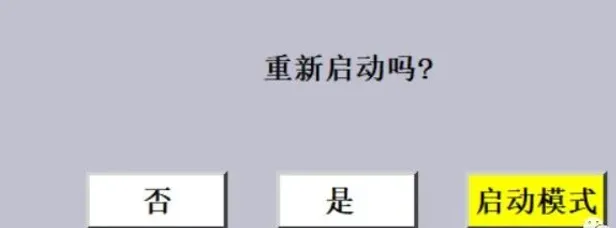
在弹出的画面中移动示教器键盘光标,选择“启动模式”。按下示教器键盘“ENTER”键。
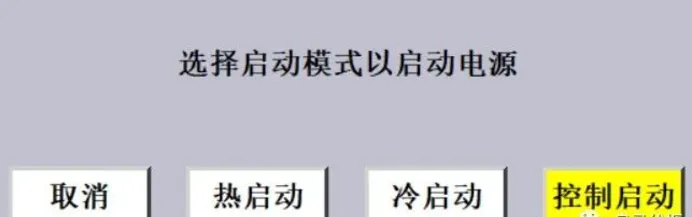
之后机器人将自动重启进入控制启动画面。重启完成后,依次按下示教器上的“MENU-下页-程序设置”。

用户任务:默认4个,最大28个。控制器允许同时运行的最大TP程序数。
在上图中,我们可以根据需求更改各个用户数据的个数,更改完毕后冷启动即可。
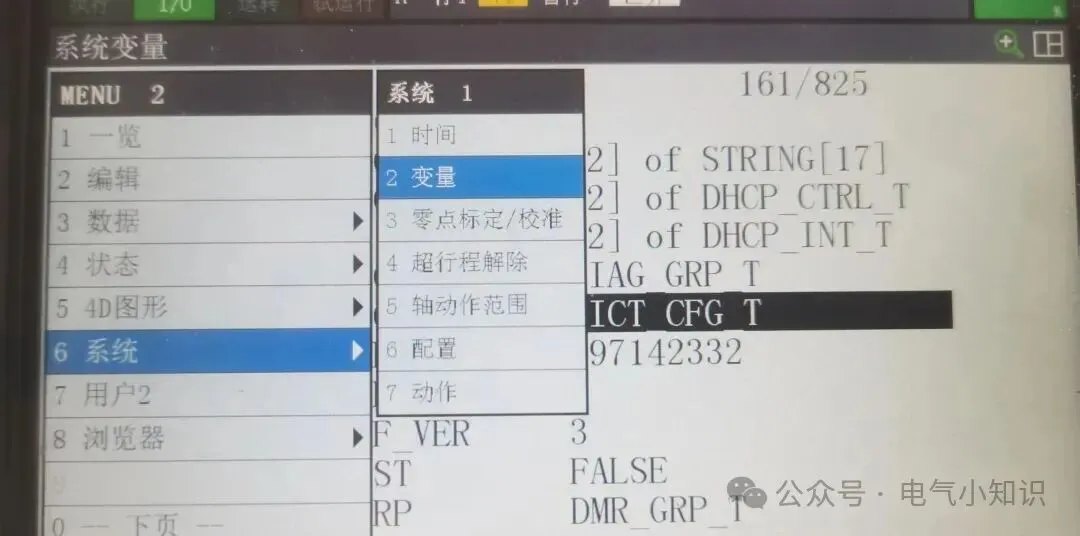
2、通过变量进行扩展
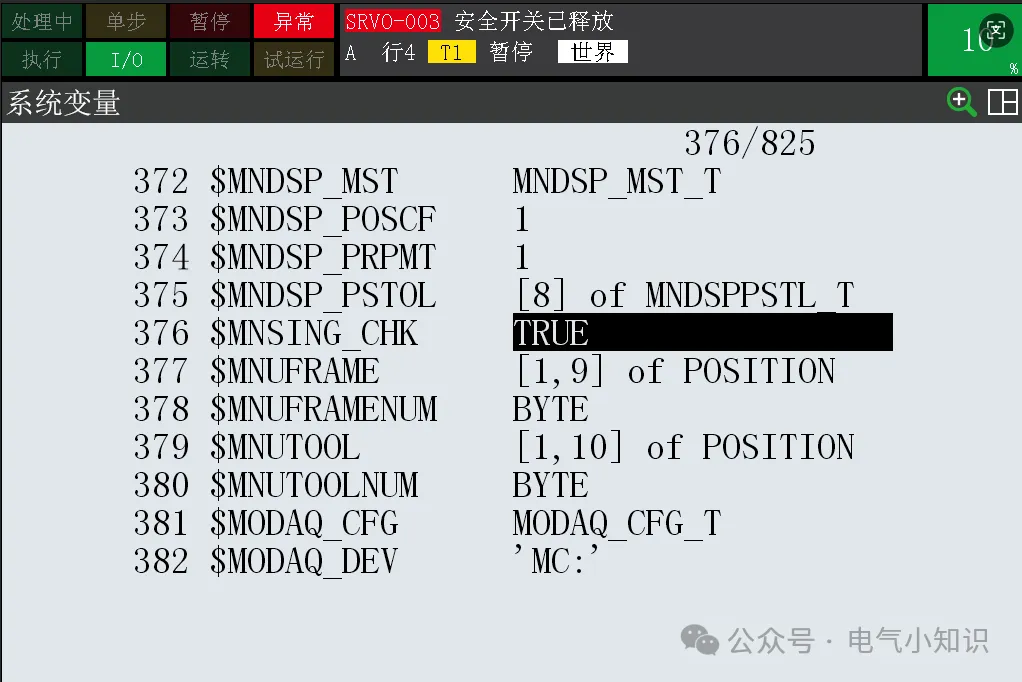
按照上述同样的方式进入“控制模式”后,按下“MENU-变量”,找到以下变量直接更改值即可。
$MAXUALRMNUM
用户报警数量扩展
$MAX_DIG_PRT
IO点数量扩展
$SCR.$MAXNUMUFRAM UFRAME数量扩展
$SCR.$MAXNUMUTOOL UTOOL数量扩展
注意:参数设定完成后,按下“FCTN → 冷启动”重新开机后生效。
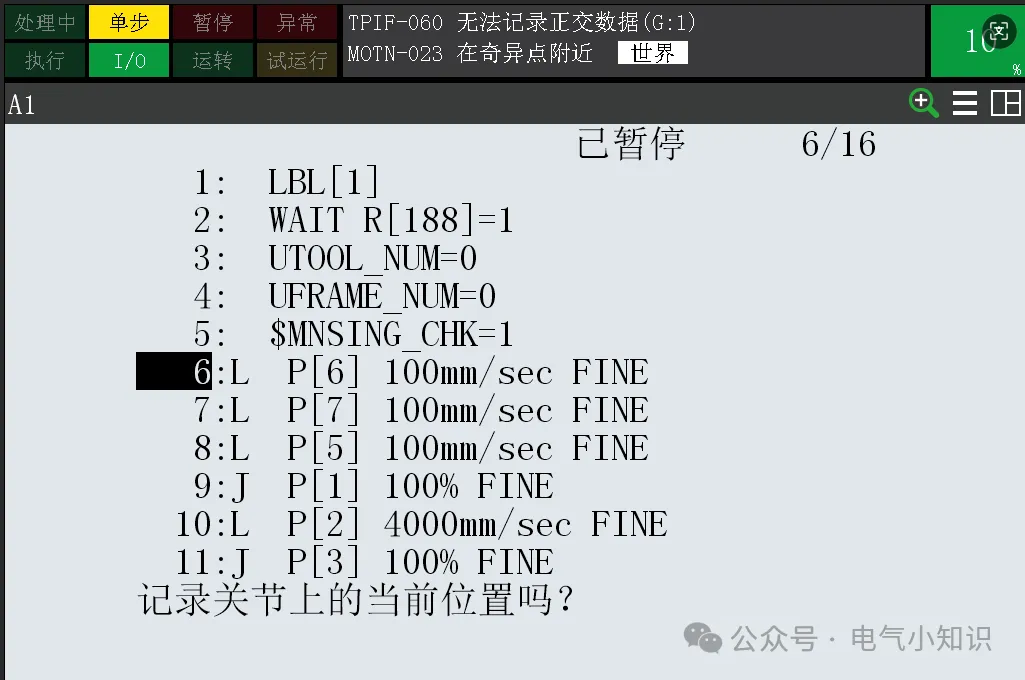
FANUC机器人奇异点检查功能(系统变量$MNSINGCHK)实操
原创
John Leey
John Leey
电气小知识
2026年3月19日 03:00
上海
听全文

奇异点类型:
腕部奇异点(最常见):J5≈0°,J4/J6共线 → 手腕剧烈反转
肘部奇异点:J2/J3/J5共面 → 手臂“伸太直”锁定
肩部奇异点:手腕中心与J1轴共线 → J1/J4瞬间180°旋转


10、FANUC机器人CRMA15、CRMA16板卡接线及分配详解
11、FANUC机器人CRMA52A、CRMA52B板卡接线及分配详解
42、FANUC机器人和朗格LOG210-S6注塑机连接互锁实现全自动上下料的一种控制实现方式
45、FANUC机器人气压检测功能的使用及气压检测异常报警的解除
53、FANUC机器人(初始化启动、控制启动、冷启动、热启动)介绍
54、一次FANUC机器人示教器死机、手自动无法切换等故障现象的排查解除(R-30iB Mate型控制器)
55、现场实操FANUC机器人“SRVO-271 EXEMG2状态异常”故障的解除过程
56、FANUC机器人PROFINET通信从站配置(西门子1500PLC做主站,机器人做从站案例)
57、FANUC机器人PROFINET通信配置S523-Profinet Fanuc Board板卡实操(PLC做主站 机器人做从站)
60、FANUC机器人增加干涉区数量实操(变量$NUM_RSPACE)
61、FANUC机器人程序运行结束后程序指针不返回到首行的参数设定实操(变量$PNS_END_CUR)
62、FANUC机器人干涉区启用状态监控(变量$RSPACE1[i].$ENABLED)实操
63、FANUC机器人禁用外部信号(变量$OPWORK.$UOP_DISABLE)实操
64、FANUC机器人STEP单步状态监控(变量$SSR . $SINGLESTEP)实操
66、FANUC机器人程序位置路径编号自动顺序排列实操(变量$POS_EDIT.$AUTO_RENUM2的使用)
67、FANUC机器人与三菱Q系列PLC CC-LINK通信实操详解(三菱QJ61BT11N做主站,FANUC机器人做从站)
68、FANUC机器人导出LS格式的TP程序(可供记事本格式直接打开程序)实操
69、FANUC机器人强制终止程序的三种方法实操详解(CSTOPI信号及变量$SHELL_CFG.$USE_ABORT运用)
71、FANUC机器人自动备份功能运用实操(将误删除的文件进行找回恢复)
72、FANUC机器人程序名称筛选功能实操(系统变量$PGINP_FLTR)
73、FANUC机器人示教器软面板(Panel)功能创建实操详解
75、FANUC机器人RSR外部启动时序实操详解(附PLC源程序)
80、通过$OVRDSLCT.$OVSL_ENB变量控制FANUC机器人“外部信号倍率选择”功能的禁用与启用
82、FANUC机器人碰撞保护报警后无法手动移动处理方法实操
83、FANUC机器人多任务并行功能(RUN指令)实操运用详解
84、FANUC机器人奇异点检查功能(系统变量$MNSINGCHK)实操
本文仅为方便机器人工程师之间的技术交流学习,仅作为个人实践总结参考,不代表FANUC机器人官方。若涉版权及其他问题,请后台联系删除。感谢支持。欢迎关注支持原创,转载请注明出处。