 夜雨聆风
夜雨聆风





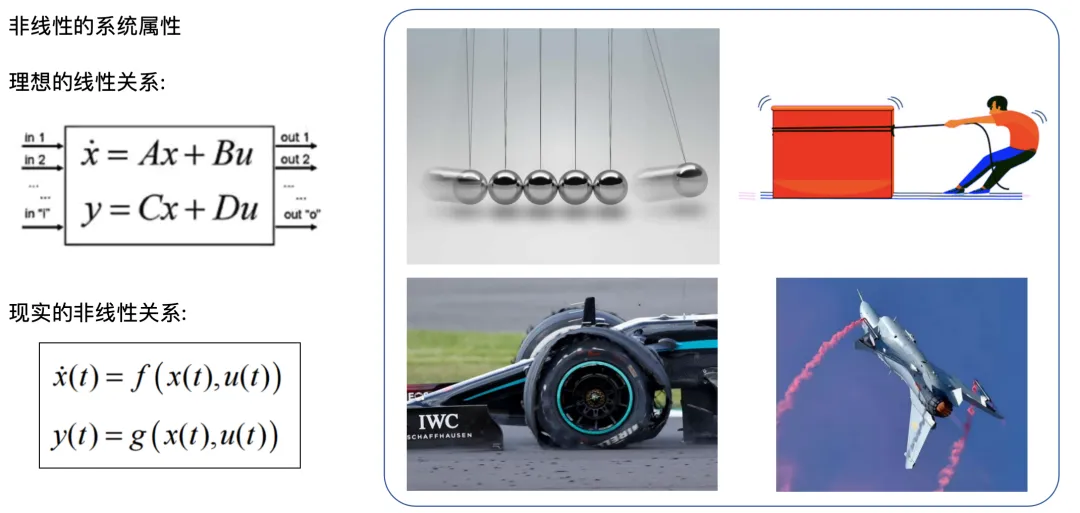
复杂系统问题面前AI的优势:从数据驱动到分层架构
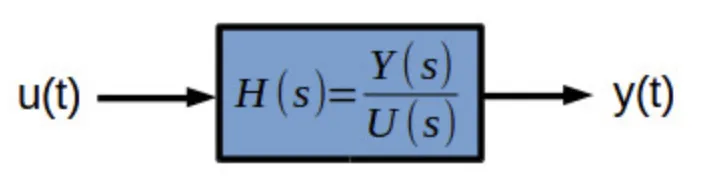
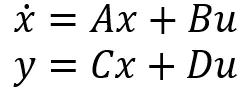
transfer function for SISO systems

WWII Servomechanisms
Representative MIMO systems
在此框架下,控制系统被进一步优化:观测器层面引入了卡尔曼滤波器(Kalman Filter),通过融合预测状态估计与实际测量值,得出最优状态估计值 ;控制器层面则发展出以线性二次型调节器(LQR)为代表的优化逻辑,通过最小化代价函数(如积分代价函数)来实现最优控制。
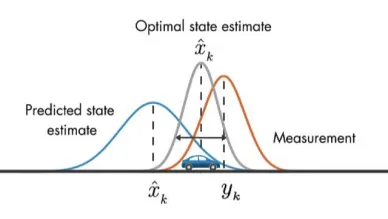
Observer + Optimization = Kalman Filter


二、 令人心安的数学保证
可以说,传统控制理论最大的魅力在于其可被数学证明的稳定性界限,为工程应用提供了极其可靠的保证。
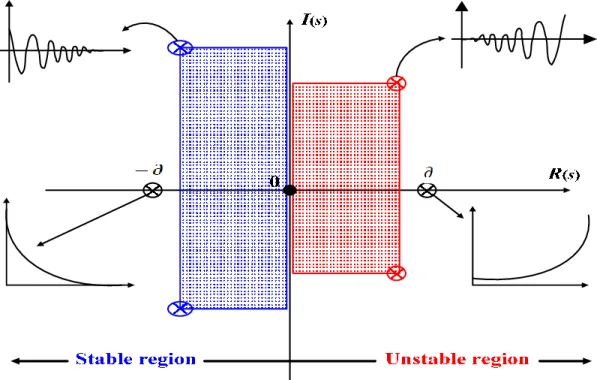
e.g.1.通过极点配置(Pole placement),可以在复平面(s-plane)上严格划定并设计系统的稳定模态与不稳定模态。
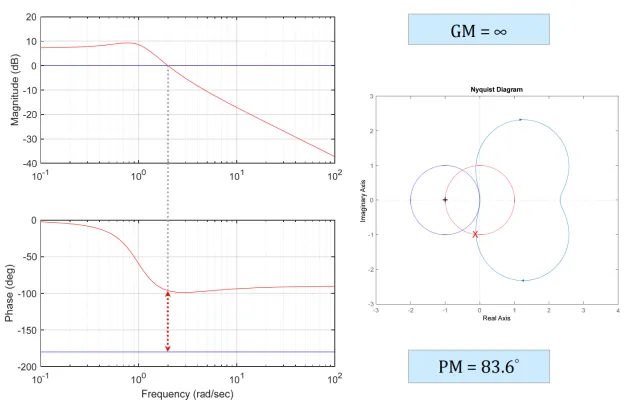
e.g.2.在应用 LQR 控制等现代方法时,系统可以被数学证明拥有无穷大的增益裕度(Gain Margin = ∞),以及至少 60 度的相位裕度(Phase Margin > 60degree)为系统提供了极佳的鲁棒性。
由于真实世界的物理系统往往是非线性的,尽管有大量控制理论专家依旧在努力利用各种非线性系统线性化转化方法来拉近现实与数学模型之间的距离,但是当物理参数繁杂到难以用精确的方程式穷尽描述时,完全依赖解析模型变得不再可行。数据驱动(Data Driven)方法随之崛起,逐步替代模型驱动。
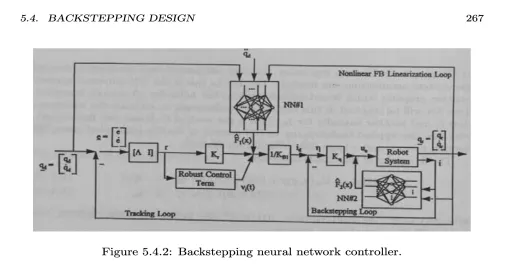
Lewis, F. L., et al. (1996). “Stable Neural Network Control of Rigid-Link Robots.”
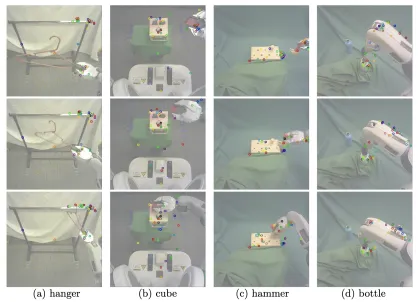
Levine, S., et al. (2016). “End-to-End Training of Deep Visuomotor Policies.” (Berkeley)
阶段三(2018年):模拟真实世界。 针对现实中训练试错成本太高昂的问题,研究人员(如 Ha & Schmidhuber)引入了世界模型(World Models)与变分自编码器(VAE)。AI 学会了对环境进行降维表征,并在自己构建的虚拟“想象”环境中进行快速演化和策略学习。
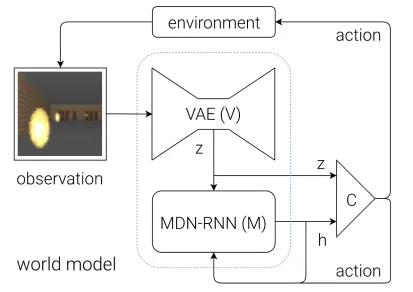
Ha, D., & Schmidhuber, J. (2018). “Recurrent World Models Facilitate Policy Evolution.”
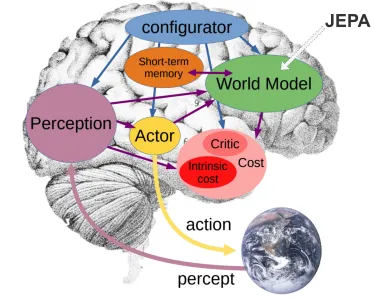
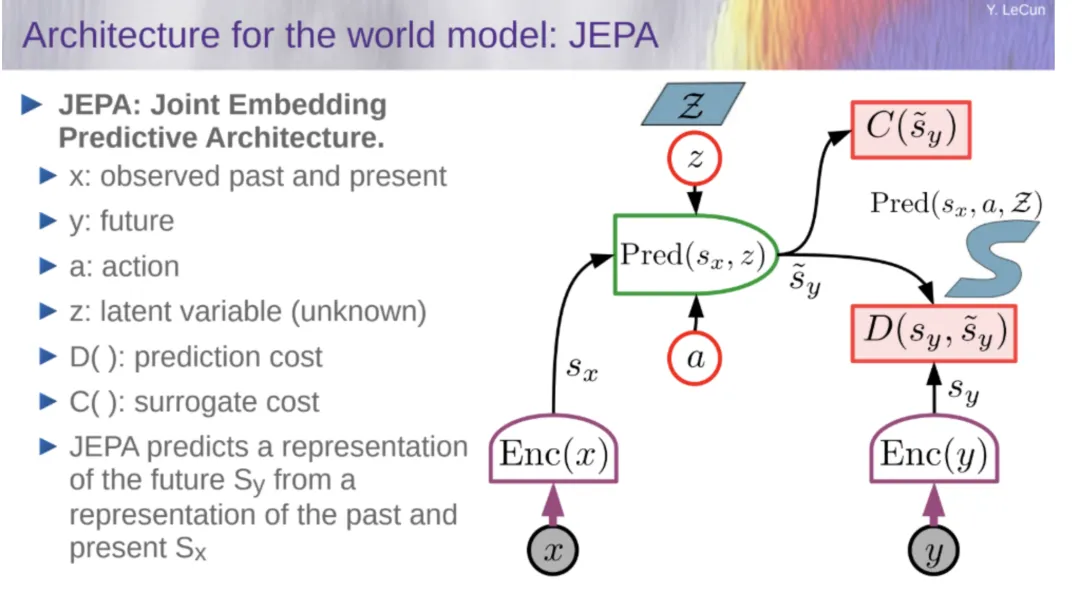
LeCun, Y. (2022). “A Path Towards Autonomous Machine Intelligence.”
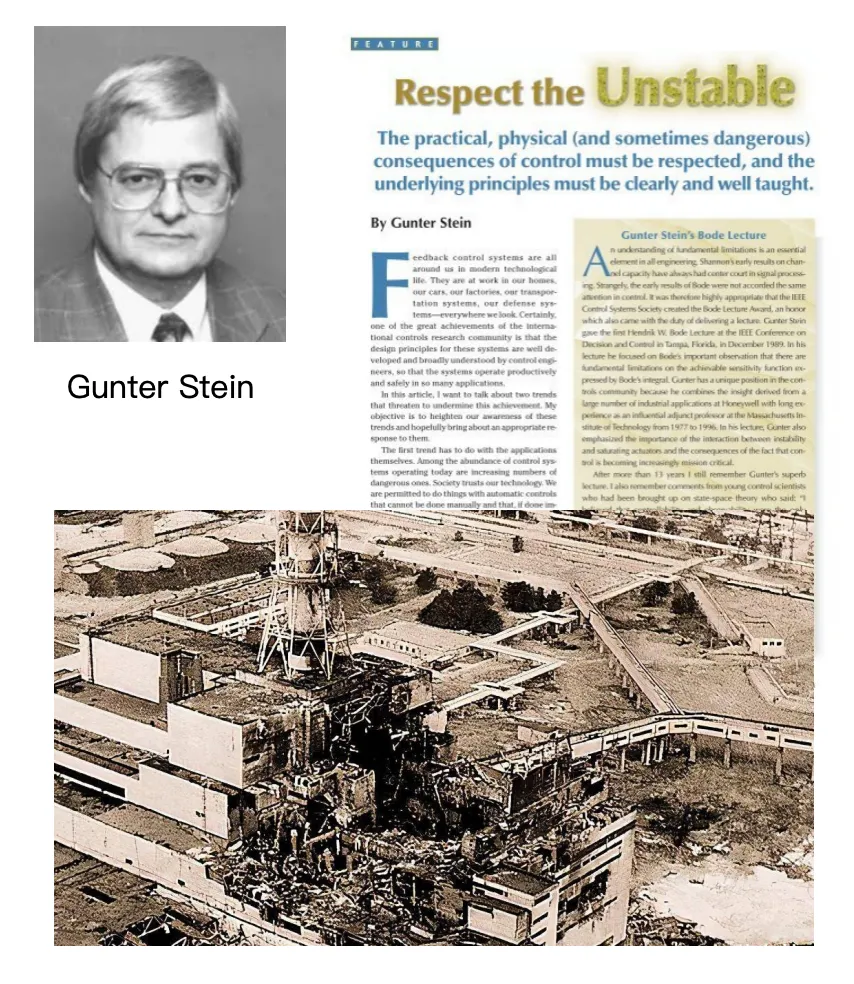
四、理论隐患:数学保证的彻底失效
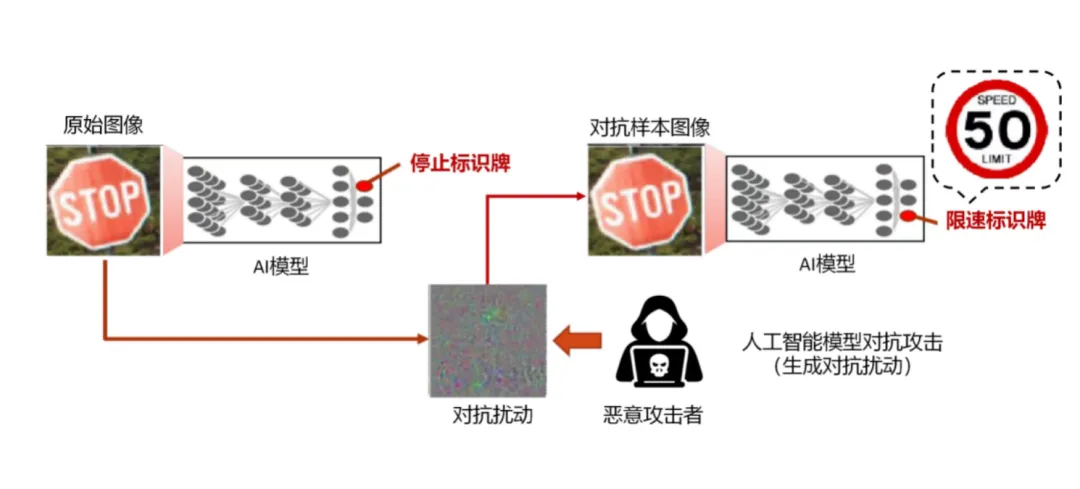
尽管有大量利用数据驱动的控制方法展露头脚,但是数据驱动的狂飙突进,直接导致了传统控制理论中绝对稳定性的失效,“不可靠”成为了数据驱动控制最大的弊病。
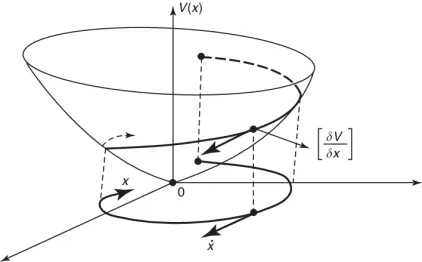
李雅普诺夫(Lyapunov)稳定性的终结: 经典理论中,如果能为一个系统找到一个满足正定条件(V(x)>0)且其导数负定的李雅普诺夫函数 V(x),即可证明该系统具有全局渐近稳定性。然而在深度强化学习或 JEPA 等巨型神经网络中,控制逻辑被黑盒化为数亿个非线性权重参数,人类完全无法为其构造出一个对应的李雅普诺夫函数。系统最终会收敛到安全平衡点的数学证明随之消失。

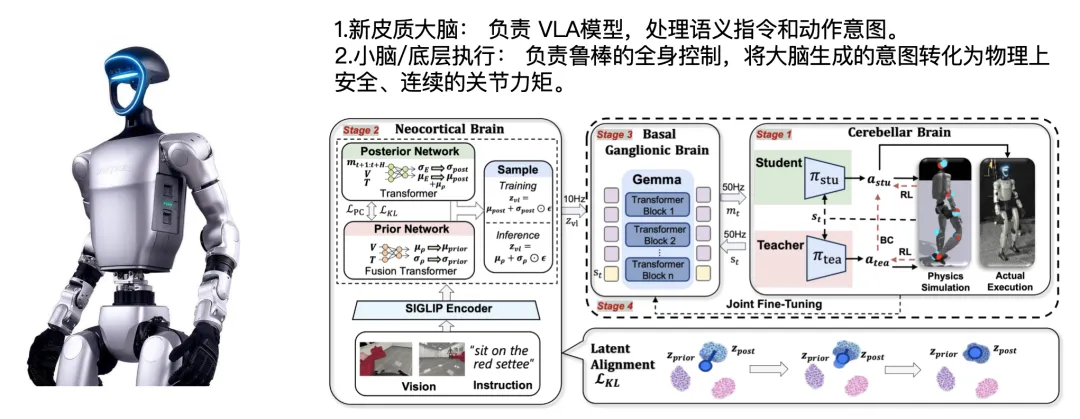
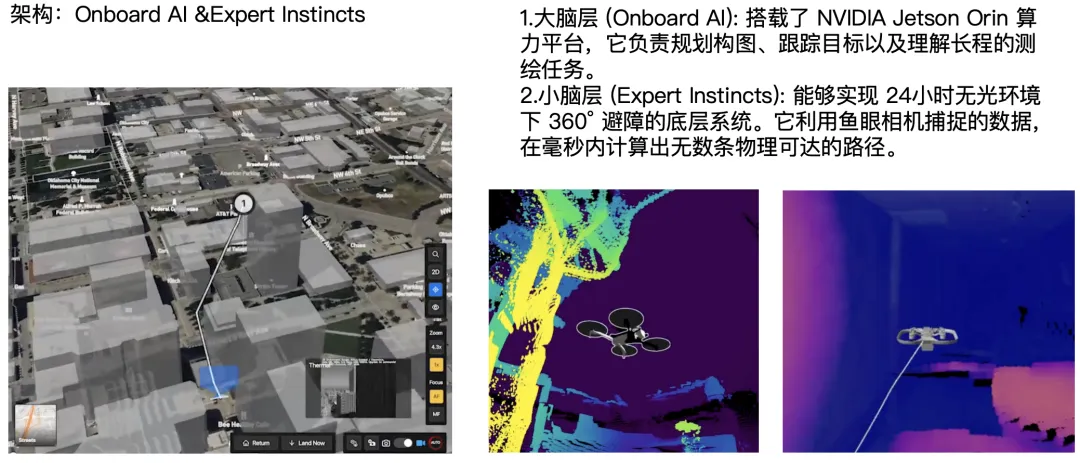
五、分层架构的未来:仿生学视角的融合与重构
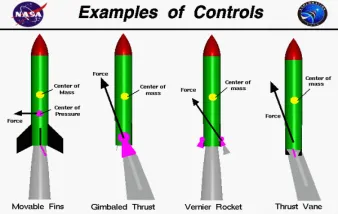
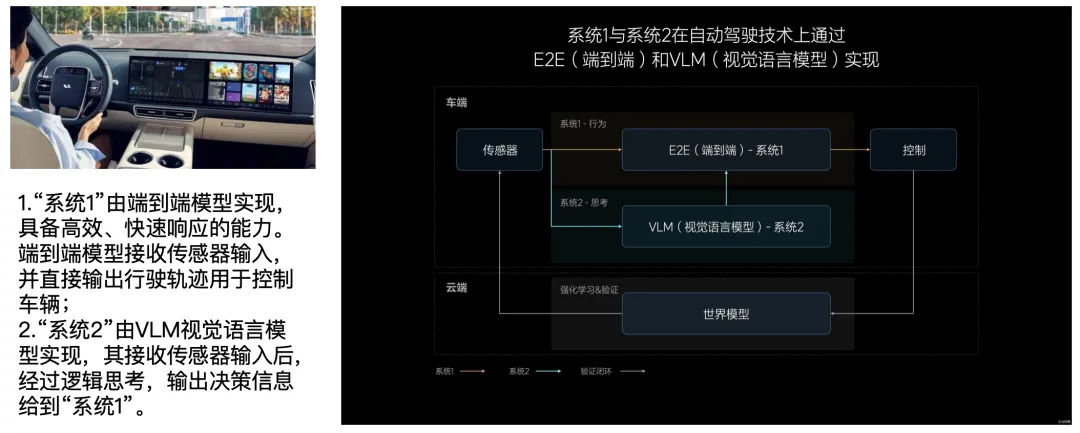
理想汽车(Li Auto)自动驾驶:划分为 System 1(系统1-行为)与 System 2(系统2-思考)。“系统1”是一个端到端(E2E)模型,直接接收传感器输入并输出行驶轨迹,具备极高的执行效率和快速响应能力;“系统2”则是一个视觉语言模型(VLM),负责复杂的逻辑推理,并将思考后的决策信息传递给系统1指导其行为。
结语
我想在工程技术与理论的发展进程中,没有任何一次单一路线的革新是完美无缺的。数据驱动的 AI 为复杂现实环境的适应能力极大地扩容了现代控制理论的适用场景边界;而成熟稳健的传统控制理论,则为 AI 剥离“黑盒泡沫”提供了最坚实的安全与数学基础。

Intelligence (AI architecture) + Stability(Control system)= Trustworthy(Embodied AI)
我相信这将是引领未来复杂系统发展的必然公式。
香港中文大學機械與自動化工程學系在讀博士